Lorenz_Keel
-
Numero contenuti
572 -
Iscritto
-
Ultima visita
-
Giorni Vinti
3
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di Lorenz_Keel
-

problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
bha sempre uguale.... migliorato un po' l'esterno ma il riempimento continua ad avere problemi -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ok ho fatto un po' di cubotti come test, da 185 a 200° facendo una prova ogni 5° la differenza non pare molta.... poi ho preso quello con la temperatura migliore e ho aumentato il flusso al 105% con cura ma non sembra essere cambiato di molto, ora ho provato a ripulire ancora un po l'estrusore e vedere se cambia qualcosa. vi aggiorno più tardi -
Sarebbe bello scannerizzare il mio gatto XD ma col fatto che i laser sono tutti piani le zone della base e del lato alto come escono?
-
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
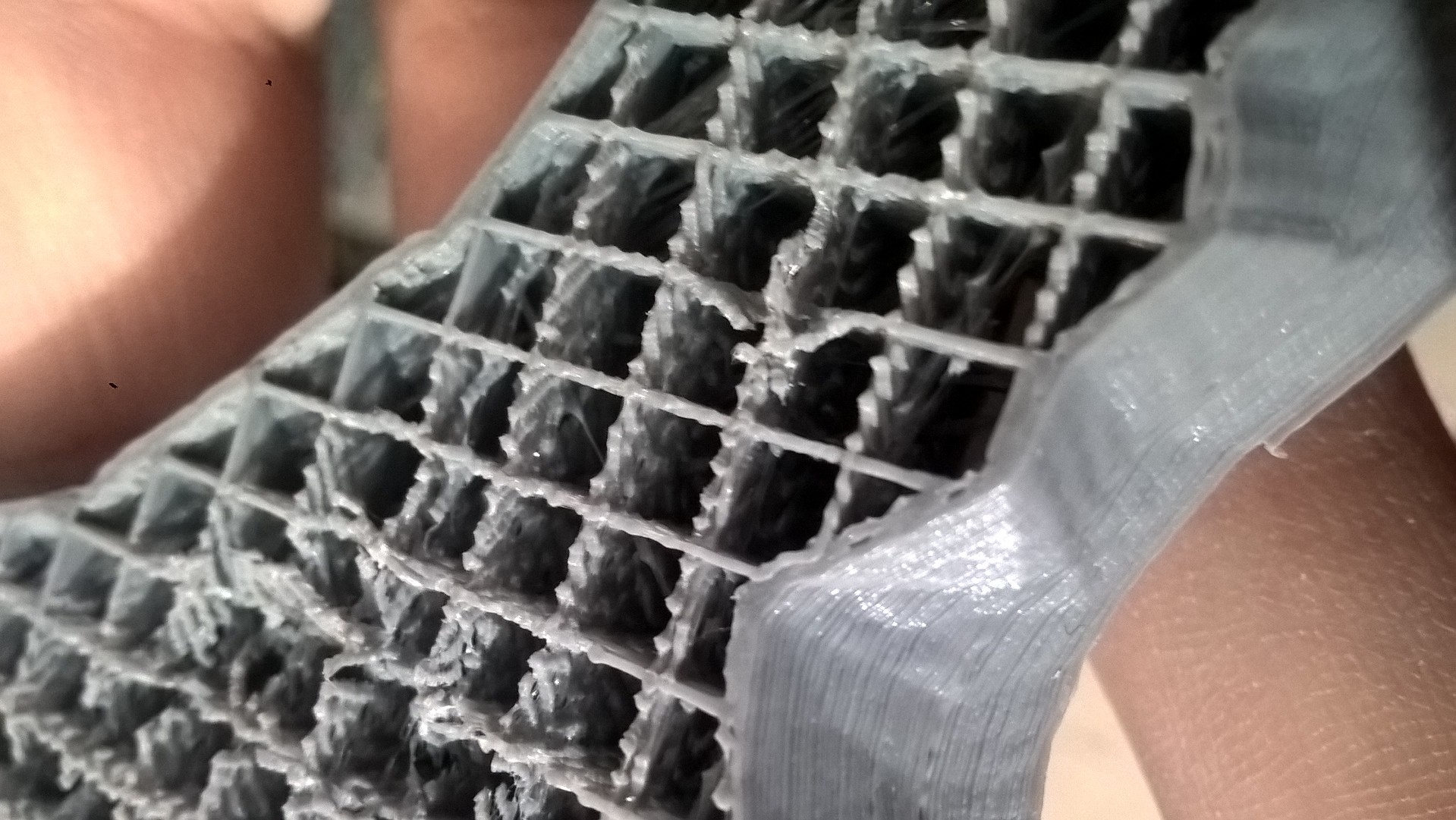
ho provato ad aumentare di 5° e pare leggermente migliorato, per aumentare l'estrusione lo devo fare da cura (in cura la sezione flusso è già al 100% quindi in caso posso metterlo al 105?) o da gcode? aggiungo foto della qualità pessima del riempimento che stà facendo questo filamento
-
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ok se serve ti mando anche i dati del gcode -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
non saprei ora come ora ho visto che nei tratti particolarmente lunghi il filamento tende a far saltare la ruota dentata del trascinatore del filo -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
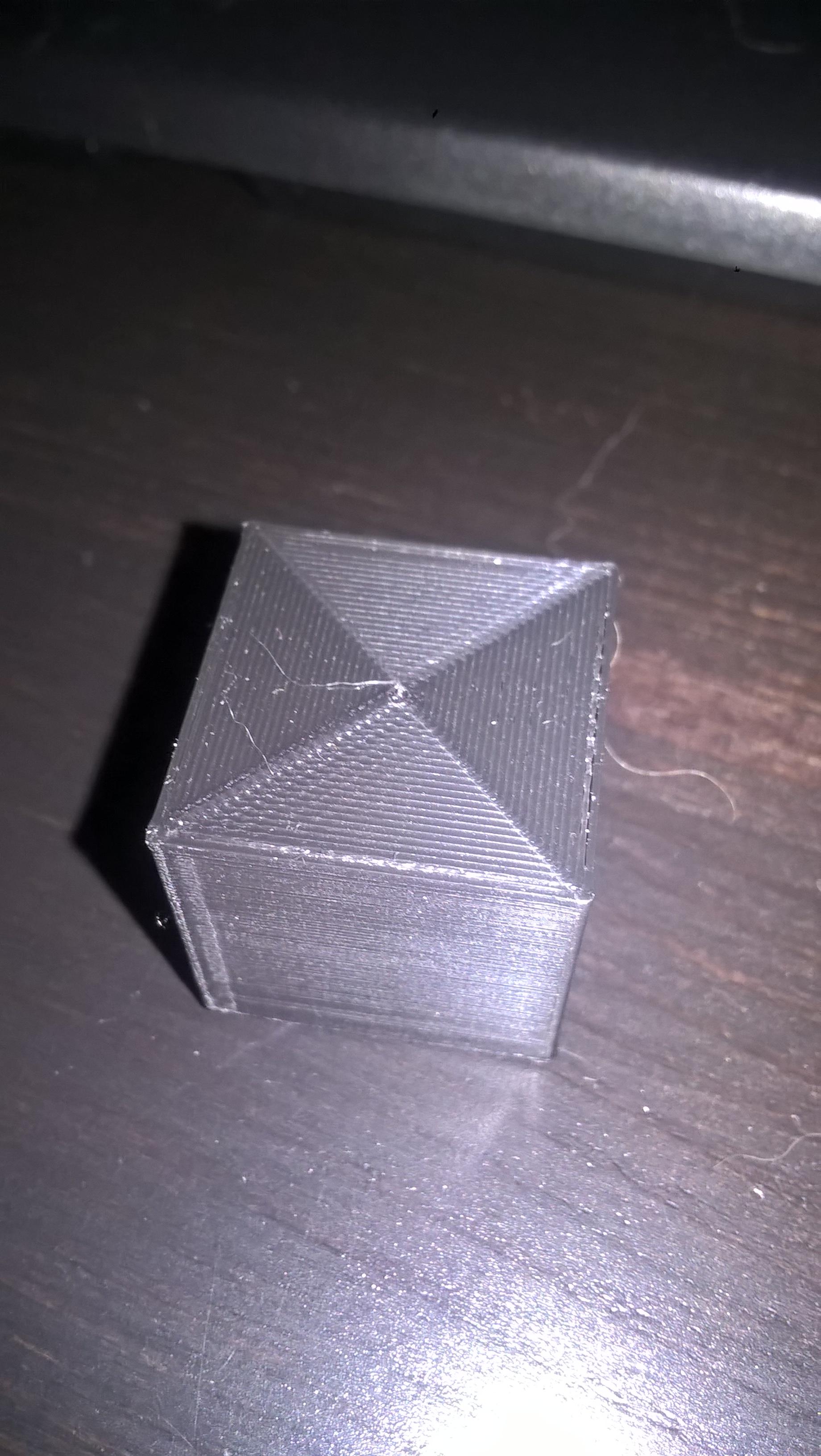
ragazzi, scusate ma ho ancora una domanda: dopo le dritte sulle impostazioni da inserire con il gcode pareva andare tutto bene, ma ora ho finito la prima bobina e ho inserito una nuova bobina stessa marca cambia solo il colore ma la qualià è calata... ho provato a fare un cubo di calibrazione e le misure dei lati sono giuste ma è come se i filamenti non si unissero bene lateralmente tra loro anche la base di ancoraggio sul piano tende a sfilarsi più che staccarsi metto foto per far capire cosa intendo
-
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
sicuro che il piano sia livellato bene? a fa quello scherzo quando l'estrusore mi parte un po' troppo alto... ma non sono un grande esperte anzi.... cmq per il fatto che l'estrusore parta alzato rispetto all'autohome qualcuno sa aiutarmi? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
grazie valuterò linux! cmq non credo che sia il pla ad essere scadente, oltre ad averlo preso in un negozio italiano, ho visto che quando attacca come si deve è tosto da togliere. quello stesso pezzo che avevo fatto vedere che mi si era staccato quando l'ho rifatto ho dovuto usare acqua calda e pazienza per toglierlo. il fatto è che non capisco perchè nonostante livelli come si deve il piano quando la stampa parte è difficile che sia all'altezza giusta quando comincia a stampare.... quindi stoppo la stampa faccio un autohome e ritento e forse siamo all'altrezza giusta.... senza toccare il piano! qualcuno ha qualche idea sul perché? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
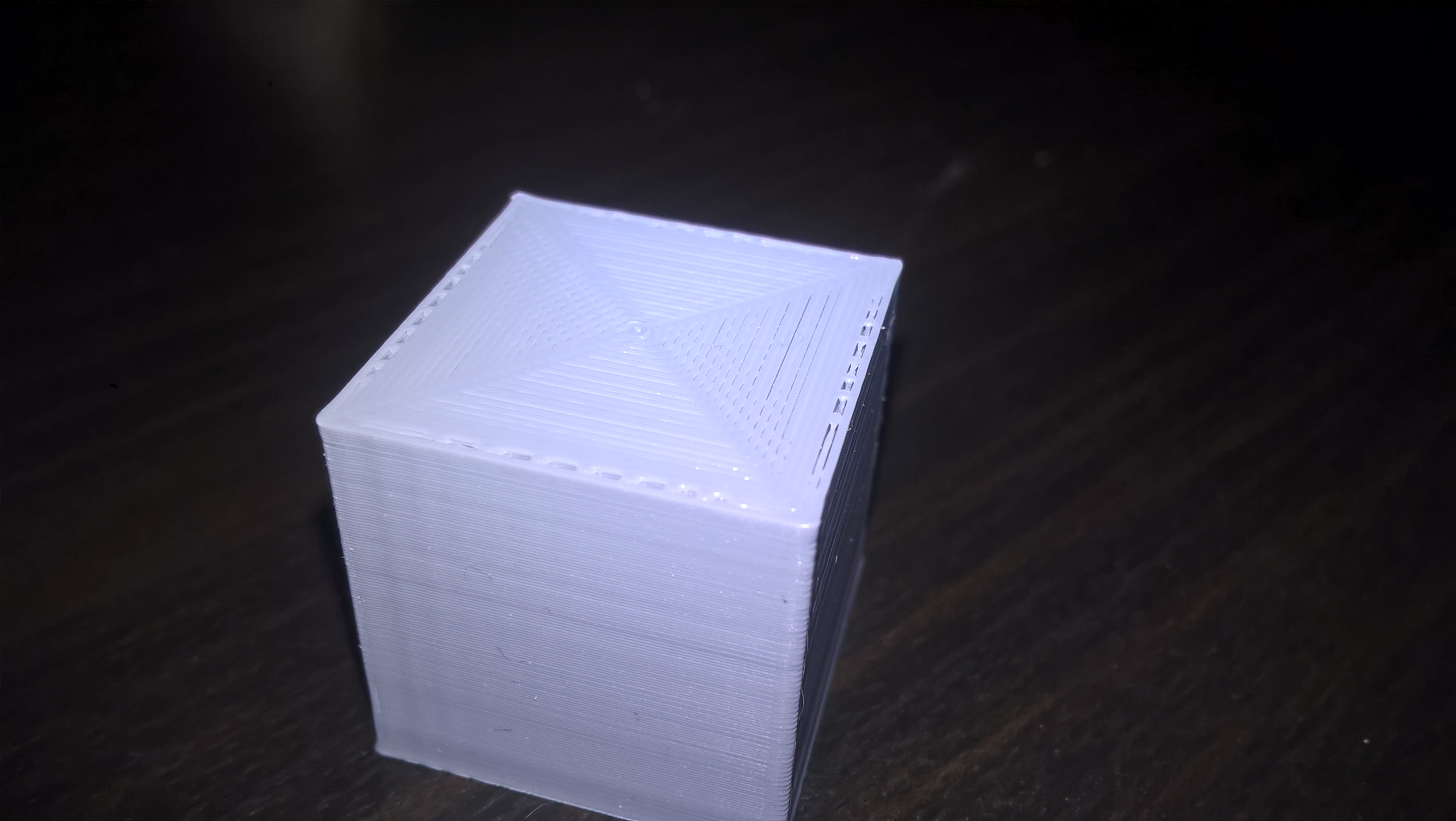
ragazzi dato che la stampante non mi tiene memorizzate le modifiche ogni volta devo collegare il portatile e lasciarlo collegato durante la stampa. visto che ho un netbook che non uso più se mando le stampe dalla stampante e uso il pc solo per mantenere i dati non ho problemi di potenza giusto? una volta che mi tiene repetier host va bene giusto? non rischio rallentamenti o altro? ps finalmente un prodotto elaborato finito!
-
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
a me fa effetto nostalgia -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
che tipo di colla usi? Oltre a questo per salvare in gcode come faccio? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
mi viene da piangere, 15 ore di lavoro e si scolla l'ultima ora facendo un casino.... se mettessi del biadesivo al posto del piatto riscaldato a 40° + lacca?
-
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ho capito anche perché... nonostante il comando m500 non mi tiene i salvataggi -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ho provato a fare il cubetto sistemando per ora solo l'altezza ma è praticamente uguale a prima.... -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
quindi cancello e sostituisco e salvo? Questi più gli altri giusto? Questi non sono sostitutivi giusto? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
giusto per capire di cosa si tratta? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
mi basta modificare questo una volta mandato il comando o devo fare qualche giro strano? quindi dato che il cubo è uscito 20.05 e 20.09 z 19.10 devo fare 400/19.1x20 quindi sostituire il 400 con un 418.8 giusto? lo inserisco da questa stressa riga dopo che ho inserito il comando o devo andare altrove? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
OK letto, non so se sia normale ma il problema si è presentato da pochissimo e lo fa solo in certe fasi di stampa. Non so se possa essere anche causato da qualcos'altro dato che è nuova e mi si erano staccati i primi pezzi, la tengo abbastanza monitorata e la cosa è cominciata da quando ho sfilato il filamento l'ultima volta.... Non vorrei aver rovinato qualcosa -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ok intanto che aspettavo risposta mi son detto "ristampiamo il cubo per avere la riprova delle misure" inutile dire che è saltato fuori un nuovo problema.... il tak tak del trascinatore del filamento.... oltre a questo è normale che la seconda riga dei comandi mi dia x e y come 80 se la cr10 è 30x30x40? è la prima volta che prendo in mano questo genere di cose quindi quel 80 potrebbero essere anche noccioline per quello che ne so. vi prego aiuto! -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
21:03:40.921 : echo:Steps per unit: 21:03:40.921 : echo: M92 X80.00 Y80.00 Z400.00 E93.00 21:03:40.921 : echo:Maximum feedrates (mm/s): 21:03:40.921 : echo: M203 X500.00 Y500.00 Z5.00 E25.00 21:03:40.921 : echo:Maximum Acceleration (mm/s2): 21:03:40.921 : echo: M201 X500 Y500 Z100 E5000 21:03:40.921 : echo:Acceleration: S=acceleration, T=retract acceleration 21:03:40.921 : echo: M204 S500.00 T500.00 21:03:40.921 : echo:Advanced variables: S=Min feedrate (mm/s), T=Min travel feedrate (mm/s), B=minimum segment time (ms), X=maximum XY jerk (mm/s), Z=maximum Z jerk (mm/s), E=maximum E jerk (mm/s) 21:03:40.921 : echo: M205 S0.00 T0.00 B20000 X20.00 Z0.40 E5.00 21:03:40.921 : echo:Home offset (mm): 21:03:40.921 : echo: M206 X0.00 Y0.00 Z0.00 21:03:40.921 : echo:PID settings: 21:03:40.921 : echo: M301 P21.73 I1.54 D76.55 questo giusto? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
OK tutto chiaro stasera spero di aver tempo... -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
Ammetto totale ignoranza su quello che dici -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
ma devo essere collegato alla stampante giusto? -
problemi primi strati pla
Lorenz_Keel ha risposto a Lorenz_Keel nella discussione Materiali di stampa
non ho ancora capito come accedere al gcode ripeto ho cura 3.1.0 e una cr10