Carlo50
-
Numero contenuti
148 -
Iscritto
-
Ultima visita
Obiettivi di Carlo50
")
Newbie (1/14)
33
Reputazione Forum
-
Origine degli assi X ed Y durante l'incisione con laser e senza uso di estrusori
Carlo50 ha risposto a Carlo50 nella discussione Software di slicing, firmware e GCode
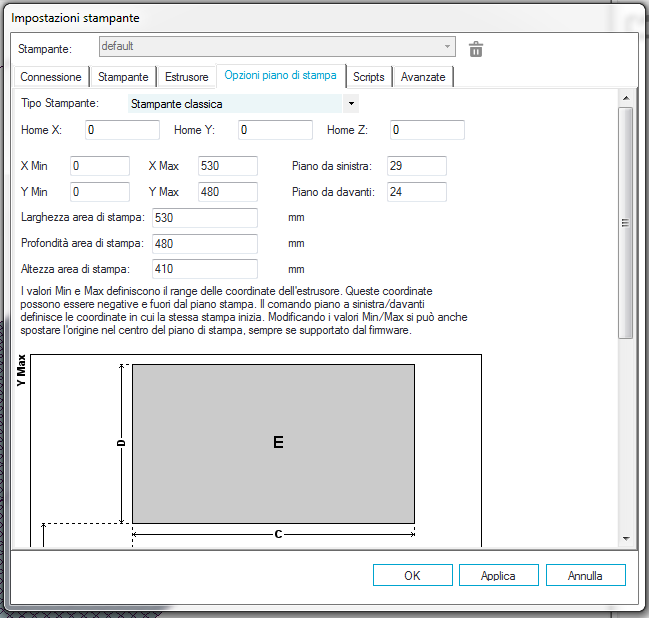
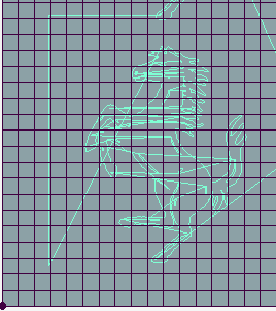
Ho provato ad inserire la modifica della foto 1 ed e' andato tutto a posto nella foto 2 Almeno adesso se metto il materiale a g28, sono sicuro di quello che faccio. Grazie Carlo
-
Origine degli assi X ed Y durante l'incisione con laser e senza uso di estrusori
Carlo50 ha pubblicato una discussione in Software di slicing, firmware e GCode
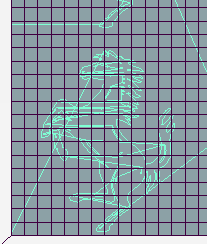
Allego foto della griglia dove si puo' vedere che l'origine degli assi sia spostato X + 29 ed Y + 25.4 che sono le esatte misure di offset dell'estrusore n. 0 Come posso fare ad azzerare questa differenza quando non uso estrusori ma solo il comando M106 che mi accende il laser? Non e' un problema fondamentale, ma mi svia quando calcolo le dimensioni del foglio da incidere. Carlo
-
Mi rincresce contraddirvi, ma e' sufficiente invertire 1 con 2 oppure 3 con 4. Nei connettori del motore, diventano 1 con 3 oppure 4 con 6. Normalmente si riesce sfilando gli stessi e reinserendoli giusti. Carlo
-
Piccolo tornio con stampante 3D
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Scusatemi il ritardo ma mi sono sottoposto ad un intervcento chirurgico al ginocchio sinistro, ma sta andando tutto bene. Chiarisco alcune cose, che mi sembrano essenziali: La sequenza dei comandi e' la seguente, M84 // Libera L'asse X dalla dimensione impostata e permette il seguente comando G1 X 100000 F XXXX // Vai alla distanza di 100 metri alla velocita' impostata Praticamente lo step motor deviato tramite il rele', gira ininterrottamente per molto tempo, quindi fa proprio il caso mio. Se poi voglio farlo rirare a rovescio, basta cambiare la sequenza in questa M84 M92 X 100000 G1 X 0 F XXXX Ora sto spostando tutto il comando sull'asse Z perche' ho capito di aver bisogno dei due movimenti orizzontali, poi tutto sara' spostato su Z. Carlo -
Piccolo tornio con stampante 3D
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Ho provato il comando M 84 che elimina il massimo spostamento e lo posso impostare anche a 100.000. In conf.adv xo lasciato attivo solo X e dopo 60 secondi torna normale. Grazie -
Piccolo tornio con stampante 3D
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Il rele' mi serve solo per deviare i 4 fili dall'asse X al connettore del mandrino che vado a fissare allo chassis della stampante. provero' a cercare l'attivazione del comando CNC poi vi so dire. Carlo -
Piccolo tornio con stampante 3D
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Grazie, ma vorrei integrare glim altri assi Y e Z con un motore che gira in continuazione, con pure la regolazione della velocita' e del senso di rotazione, senza aggiungere altro software od hardware. Anche con sommergibile e' possibile pescare, basta avere uno scomparto da pressurizzare alla stessa pressione dell'esterno, aprire un portellone ed issare il pesce. Di seguito si chiude il tutto e si depressurizza lo scomparto recuperando il pescato. Tutto molto teorico, ma fattibile. Carlo -
Ho modificato il collegamento dello step motor dell'asse X con un rele' a 4 vie. Dopo averlo fissato ad un lato del telaio, gli ho dato il comando G28 per vedere se girava permanentemente, ma ad un certo punto si ferma perche' una istruzione in marlin controlla il termpo passato dal comando all'intervento del fine corsa. Dove trovo questa definizione per poterla eliminare? Ho cercato in configuration h e adv, ma non l'ho trovata. Carlo
-
DRV 8825 a 1/16 ed altri a 1/32
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Forse ho trovato l'inghippo nel fatto di aver omesso il ponticello su m2 che ritenevo superfluo. Ora vanno tutti alla stessa velocita'. Scusate della discussione inutile. Carlo -
DRV 8825 a 1/16 ed altri a 1/32
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Ho misurato la resistenza dei pin m1, m2 ed m3 riferita a massa e sono tutti di 100 kOhm, per cui i driver drv 8825 nascono tutti uguali, con la stessa configurazione a full. Naturalmente se sulla scheda colleghi tutti i terminali a +5 volt tramite la resistenza di 4,7 kohm, questi vanno a livello alto e convertoni il full in 1/32. Quindi sostituendo un driver con un altro, la regolazione resta identica e non deve cambiare nulla. Carlo -
DRV 8825 a 1/16 ed altri a 1/32
Carlo50 ha risposto a Carlo50 nella discussione Hardware e componenti
Debbo dissentire con la tua spiegazione, perche' i driver arrivano con i piedini da saldare e senza alcuna regolazione riguardo ms0 ms1 ed ms2. Quindi tutte le regolazioni sono o sulla scheda oppure nel firmware, (come hai scritto tu) ed inserendo qualunque driver, deve andare sempre nello stesso modo. (le variabili restano identiche dove le ho fatte per gli altri e non vanno dietro al drive stesso). Non c'e' altra spiegazione che esistano drv 8825 a 1/16 ed altri a 1/32. Carlo -
Invertendo i tre driver degli assi con i tre degli estrusori che avevo acquistato successivamente, ma sempre della Pololu, mi sono accorto che le velocita' degli spostamenti erano raddoppiate, mentre quelle degli estrusori erano dimezzate. E' possibile che ci siano in commercio dei DRV 8825 a 1/16 massimo ed altri a 1/32 massimo? Come si distinguono? Grazie
-
Untitled (U) di prusa slicer
Carlo50 ha risposto a Carlo50 nella discussione Software di slicing, firmware e GCode
Non so cosa sia un "Bundle" e non so dove trovarlo. Io conosco le cartelle di windows e so trovare i file.ini in esse contenute, ma arrivo fin li. Carlo -
Untitled (U) di prusa slicer
Carlo50 ha pubblicato una discussione in Software di slicing, firmware e GCode
Sapete dirmi dove prusa slicer salva i parametri impostati? Vorrei portarli pari pari su di un altro PC per evitare di dimenticarne qualcuno. Ho cercato il nome con cerca ma non ho trovato niente. Grazie Carlo -
Parametro F3600
Carlo50 ha risposto a Carlo50 nella discussione Software di slicing, firmware e GCode
Ho modificato il valore sullo slicer e funziona. Grazie mille