monux
-
Numero contenuti
28 -
Iscritto
-
Ultima visita
-
Giorni Vinti
1
Obiettivi di monux
")
Newbie (1/14)
20
Reputazione Forum
-
CONSIGLIO UGELLO PER ANYCUBIC I3 MEGA-S
monux ha risposto a A203DLUCO nella discussione Hardware e componenti
anche quelli in rame placato nikel -
Comparativa ugelli cinesi Help3D
monux ha risposto a invernomuto nella discussione Hardware e componenti
come tutti i suoi articoli/video -
Trigorilla 0.0.2(Ramps 1.4) su anycubic Mega i3
monux ha risposto a Arsk98 nella discussione Hardware e componenti
fa una prova rapida caricando il firmware ufficiale anycubic. ovviamente ricordati che avrai i motori che gireranno in senso inverso se non tocchi i connettori. e poi dopo, se tutto funziona (al contrario ovviamente) carichi il fw di David Ramiro settato ad hoc per la i3 mega. altrimenti carica direttamente il Ramiro e basta PS: il Ramiro funziona senza modifiche su trigorilla NON 1.1 -
ho capito, grazie.
-
scusate la domanda ma....dato che vorrei realizzare una seconda stampante (la prima l'ho acquistata) mi sto guardando intorno. mi interessa molto il genere core xy ma, complice anche un libro sulle delta, mi è venuto il dubbio, o meglio curiosità su queste macchine. guardando un po' ovunque non ho trovato kit ma solo qualche "telaietto", un solo in realtà, alcuni componetnti per effettuare upgrade ma nulla di più. qualcuno ha qualche suggerimento? vorrei valutare i costi per realizzare una delta con area di stampa oltre i 20 cm (24; 27) di base ed almeno una 30-35cm in altezza.
-
a me sembra che i tuoi valori coincidano esattamente con le indicazioni della watterot.
-
Motori 0.9 con albero pieno e non tagliato a "D"
monux ha risposto a invernomuto nella discussione Hardware e componenti
in un video di un ragazzo che costruisce stampanti di grandi e grandissime dimensioni diceva di usarli tranquillamente e, data la longevità dei motor,i tanto vale incollarla la puleggia 😅 -
fantastici i tmc 🤣 sembrano la soluzione ai problemi essenziali della vita.....sarcasmo parte è chiaro che la vref dei tmc in generale sia una delle cose più chiacchierate della stampa 3d ma per orientarsi nella marea di guide più o meno teoriche e/o corrette credo sia necessario individuare le info che le aziende del settore forniscono proprio a proposito di questi driver. innanzitutto watterott dalla sua sezione faq - ne definisce i limiti di corrente: "...but the TMC21xx/TMC2208 SilentStepSticks can only be used up to 1.2A RMS." - dice di trovarlo empiricamente "Do not set the drivers to the maximum rated current of the respective stepper motor. A good point to start is half of the rated current and if there are problems (like step losses) then set a higher current in 0.1A steps till everythings works." ps: parla di Ampere e non di vref perchè poco prima della parte che ho estratto dice chiaramente che la regolazione dei tmc andrebbe fatta in corrente e non in tensione. - ne definisce i limiti termici: "TMC21x0/TMC2208: A small heat sink placed on the top PCB side is suitable for currents up to 850mA RMS. For higher currents use a cooling fan and a heat sink that nearly fills the top PCB side" nella pagina c'é anche un calcolatore di vref in funzione della corrente e se andiamo ad inserire 850mA (condizione max senza ventilazione forzata) il risultato sarà una Vref di 1,2 Volt.....e già da questo si capisce che molti video, con teorie aleatorie.......lasciamo perdere!! è una pagina piena zeppa di info utili sulla famiglia tmc, un'altra ad esempio: "If the motor is running/moving, then it is not allowed to switch off the power supply. Always make sure that the motor stands still and the motor outputs are deativated on shutting down, otherwise the driver IC can get damaged (because of back EMF)." la stessa watterott dice chiaramente di non usarli sugli estrusori "For most cases (except a direct-driven or bowden extruder of a 3D printer) the nearly silent stealthChop mode is suitable.If you have problems like step losses then you can use a slower acceleration or a bit higher current setting in stealthChop or you can use the more powerful and louder spreadCycle mode." ed in questa indicazione rimanda ad un video della trinamic in cui mostrano che il mondo è bello e silenzioso se si va piano e si accelera anche meno! 🤣 per farli funzionare hanno ridotto l'accelerazione da 3000 a 100 🤪 vabbè dai, la smetto......la pagina è linkata e secondo me è utile. anche la e3d ha la sua paginetta dozuki con spiegazione di come regolarli ma al momento di spiegare da quali valori partire mischia Vref ed Ampere....dice di aumentare la Vref a frazioni di 0,1A 😅 https://e3d-online.dozuki.com/Guide/VREF+adjustment+TMC/97?lang=en
-
in giro si trova una guida per far dialogare in spi i tmc2130 con la trigorilla. https://cdn.thingiverse.com/assets/b6/a9/0d/2d/d1/tmc2130_on_Anycubic_kossel_trigorilla.pdf la trigorilla ad 8bit, il classico mega2560 (ma anche l'arduino due) , ha quattro seriali, di cui uno condiviso con l'usb. resterebbero a disposizione solo tre seriali...su cui attaccare al max tre driver.
-
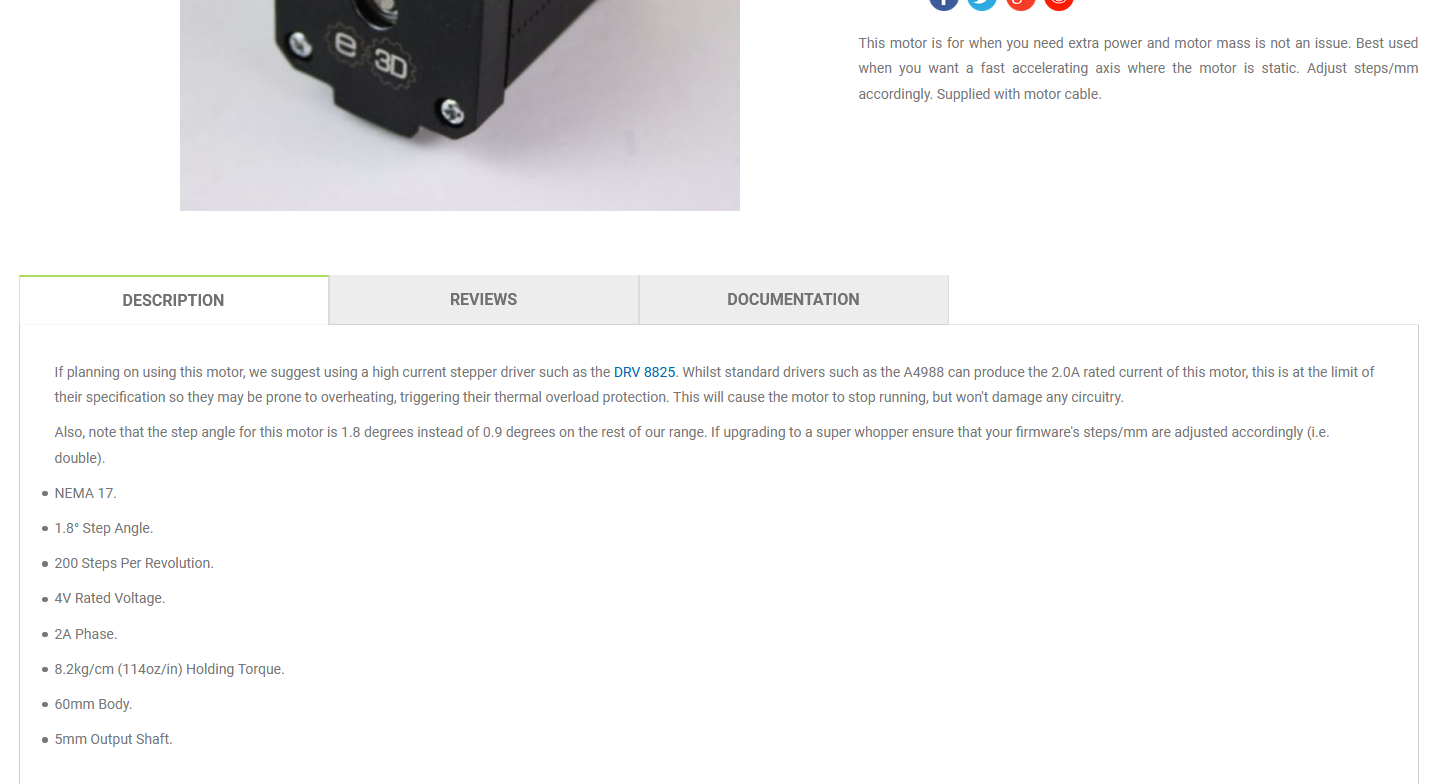
anch'io, volendo upgradare la mia macchina mi son imbattuto nella felice scelta tra i driver ed ho raccolto un po' di informazioni. la mia conclusione è che per i motori che utilizza la anycubic, in genere, il tmc2208 è il driver più sbagliato che si possa abbinare. il motivo è semplicemente legato ai suoi dati di targa e a come un motore passo-passo funziona. nei datasheet dei tmc2208 è riportata questa voce: "Motor Phase Current max 1.2A RMS, 2.0A Peak" tra le note, più in basso, dove spiega come settare la vref, c'é anche scritto che : "The best way to set the motor current is by measuring the voltage on the Vref pin (0…2.5V) and adjusting the voltage with the potentiometer. The maximum settable motor current is 1.77A RMS (0.11Ohm sense resistors), but the SilentStepSticks can only be used up to 1.2A RMS." occhio alle parti in grassetto. ed i motori anycubic hanno valore di "rated courrent" 1,5Arms alcuni "guru", anche sui propri canali youtube e/o telegram, affermano che va tutto bene e che, addirittura, fornire minor corrente ai motori li preservi, anzi li faccia sforzar meno. è evidente che per questi l'elettrotecnica sta su un pianeta molto lontano. i motori passo-passo vengono alimentati in fase di spunto, accelerazione, proprio dalla corrente di picco fornita dal driver ma poi, per garantire il loro valore di coppia massima (coppia di tenuta), richiedono al driver, in maniera costante la corrente rms. sembrerà strano ma il momento in cui un motore passo passo eroga il massimo della sua forza (coppia) è proprio quando è fermo...ma alimentato. in quella fase "spreme" letteralmente il driver ai limiti delle sue capacità nell'erogare la corrente efficace che gli serve per raggiungere il suo valore max di coppia statica. altro fattore importante è comprendere che, nel funzionamento dei motori pp, la coppia diminuisce al crescere della velocità. è inutile complicare ulteriormente il discorso, dicendo che quando ai driver viene richiesto di lavorare in microstepping, come esattamente avviene nel caso della stampa 3d, ci sono ulteriori limitazioni, o meglio, cali di corrente erogabile. guardate i dati del 2208...2A di picco che diventano 1,2 in rms quando dovrebbero essere poco più di 1,4 (Irms -> RMS (Root Mean Square) current per phase (Irms = Imax / 1.41)) . a questo punto basta leggere le indicazioni che la e3d suggerisce per poter utilizzare i propri motori ad alta coppia...ad alta corrente: "If planning on using this motor, we suggest using a high current stepper driver such as the DRV 8825. Whilst standard drivers such as the A4988 can produce the 2.0A rated current of this motor, this is at the limit of their specification so they may be prone to overheating, triggering their thermal overload protection. This will cause the motor to stop running, but won't damage any circuitry." ps: nel motore e3d il valore della "rated courrent" è di 2 Ampere ma il discorso è contestualizzabile all'accoppiata motori anycubic (1,5 Arms e driver 2208 1,2Arms)

-
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
chiarissimo, grazie mille...sei stato molto utile. dato che con raspberry siamo amici sin dalla sua prima versione, ed in casa ne ho alcuni 3b+ a dormire, vuol dire che proverò ad impiegarlo per vedere cosa ne vien fuori. certo però, che 100 mm/s reali, per la mia anycubic i3 mega s mi sembrano un po' tantini. credo che prima sarà necessario qualche upgrade importante. -
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
a dire il vero sono ancora in fase, molto iniziale, di studio (sempre per curiosità) ma....perchè non avrebbe senso? -
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
l'ho adocchiata anch'io...ci sono arrivato approfondendo l'argomento klipper 😉 se può essere utile, lascio dei link utili per la configurazione, si tratta di un bell'articolo/guida in italiano e del link corretto al configuratore di firmware reprap. https://www.3dfastprint.it/home/assistenza/configurazione-duet-wifi/ https://configtool.reprapfirmware.org/Start -
Anycubic mega X schemi e dettagli tecnici
monux ha risposto a Alessandro72 nella discussione Anycubic
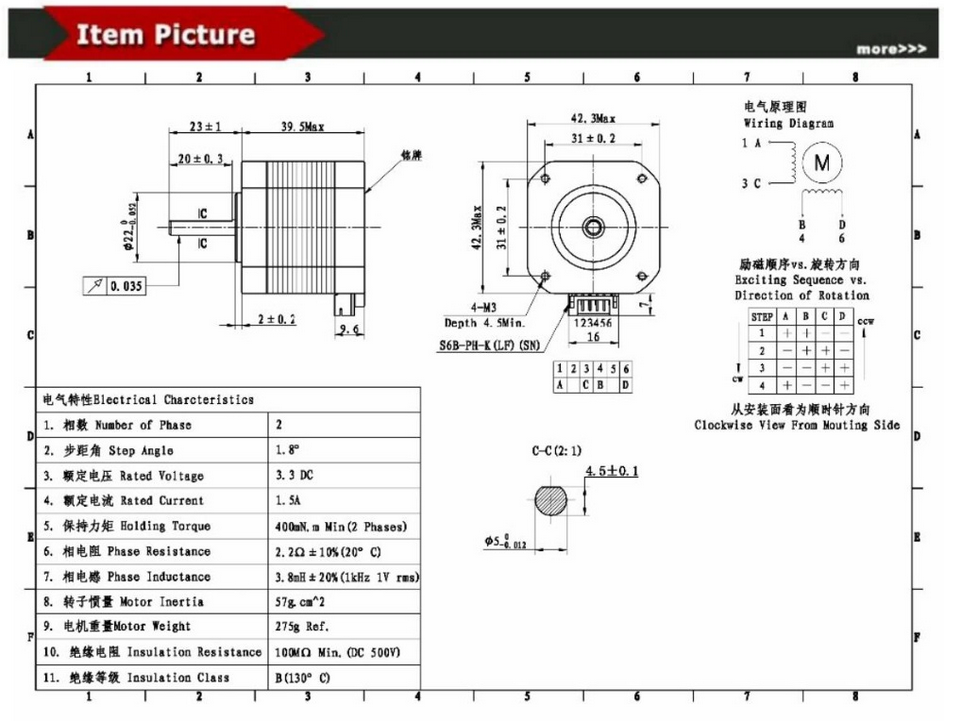
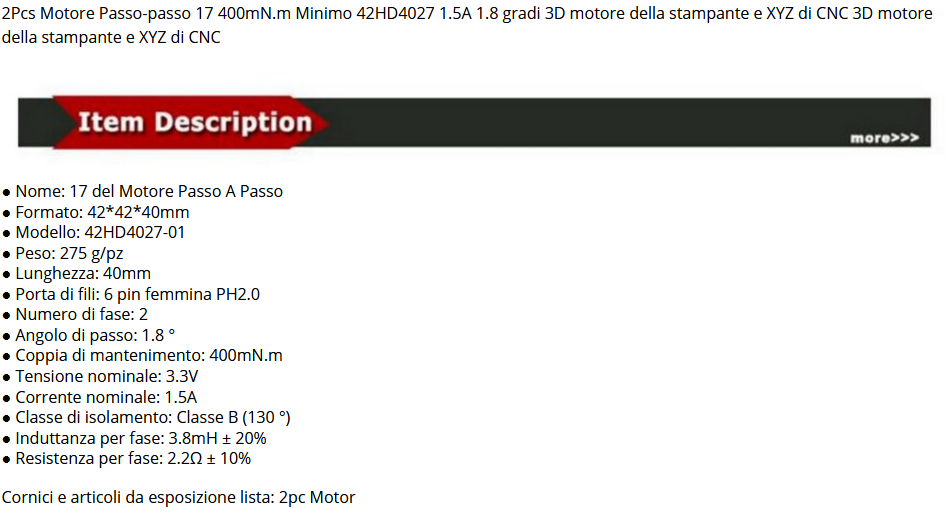
queste sono le caratteristiche reperite in rete con la sigla dei motori per i vari assi
-
INFORMAZIONI SU ANICUBIC I3 MEGA S
monux ha risposto a EMOZIONE nella discussione Hardware e componenti
dipende dagli step-drivers. con gli 8825 si