wildsharkg
-
Numero contenuti
30 -
Iscritto
-
Ultima visita
Obiettivi di wildsharkg
")
Newbie (1/14)
2
Reputazione Forum
-

Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Inversione fatta ma non c'è alcun cambiamento né nel sibilo, né nell'eccessivo surriscaldamento di X rispetto agli altri assi. Inviato dal mio iPhone utilizzando Tapatalk -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Non ci ho ancora provato! Testo! Inviato dal mio SM-G930F utilizzando Tapatalk -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Al momento non ho altri driver. Prima avevo quelli integrati nella scheda Anet 1.0 Inviato dal mio SM-G930F utilizzando Tapatalk -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
No, non li ho presi. Guardando le caratteristiche, questi mi sembravano essere i migliori. Inviato dal mio SM-G930F utilizzando Tapatalk -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Ho comunque provato ad invertire i fili ma il motore non si è mosso. Sono ritornato al cablaggio precedente ma resta il "fischio" ed il motore dell'asse X bollente. Ora sono con la corrente a 500 impostata su Marlin (se scendo sotto l'asse non si muove). Cosa posso provare per migliorare questo inconveniente? -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
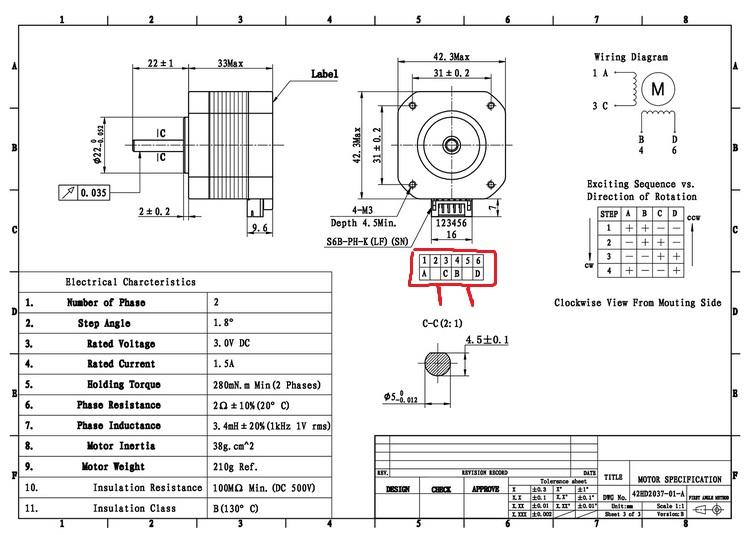
Rivedendo gli schemi ho ricostruito l'ordine corretto (come sono montati attualmente): Polarità A+ B+ A- B- PIN Motore 1 3 4 6 Colore Cavo Blu Verde Rosso Nero PIN SKR1.4 A2 B2 A1 B1 PIN Driver 1B 1A 2B 2A La mia opinione è che non vada invertito nulla. Chiedo un vostro qualificato parere. -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Grazie per l'ottimo spunto! Ti confermo che, non trovando nulla, ho testato i pin del motore con il multimetro: il grafico che hai postato è esattamente quello dei miei motori (originali venduti con la Anet A8 Plus), ovvero: il cavo Blu è abbinato con il Rosso il cavo Verde è abbinato con il Nero Quindi devo effettivamente invertire tutti i cavi verdi con i rossi! Penso di farlo sui connettori della scheda madre. Non mi resta che fare qualche prova. -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Sto approfondendo anche il tema "rumore bianco" dei motori. Ho trovato una serie di risorse che parlano di variare le impostazioni in 2 parti di Marlin, per fare il tuning di SpreadCycle: https://3dwork.io/en/complete-guide-skr-v1-4-and-tmc2209 https://marlinfw.org/docs/hardware/tmc_drivers.htm /** * Optimize spreadCycle chopper parameters by using predefined parameter sets * or with the help of an example included in the library. * Provided parameter sets are * CHOPPER_DEFAULT_12V * CHOPPER_DEFAULT_19V * CHOPPER_DEFAULT_24V * CHOPPER_DEFAULT_36V * CHOPPER_PRUSAMK3_24V // Imported parameters from the official Prusa firmware for MK3 (24V) * CHOPPER_MARLIN_119 // Old defaults from Marlin v1.1.9 * * Define you own with * { <off_time[1..15]>, <hysteresis_end[-3..12]>, hysteresis_start[1..8] } */ #define CHOPPER_TIMING CHOPPER_DEFAULT_24V comincio a sperimentare e vi dico. -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Stavo giusto cercando il foglio dati motore ma sembra non esistere. bella sfida! -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
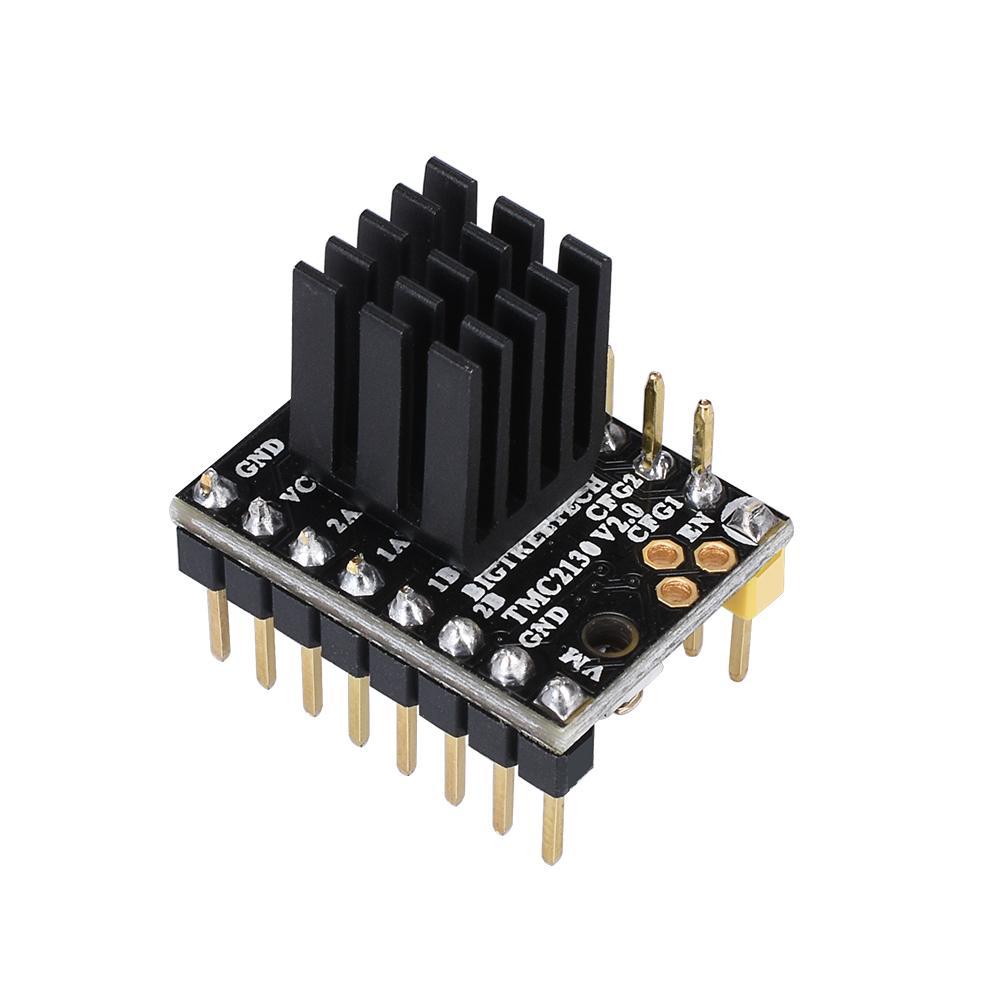
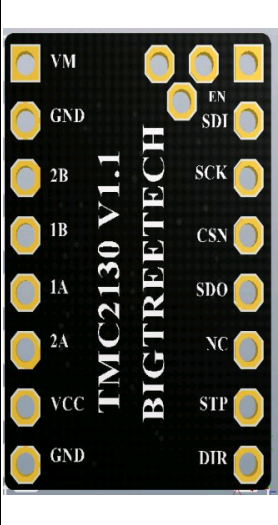
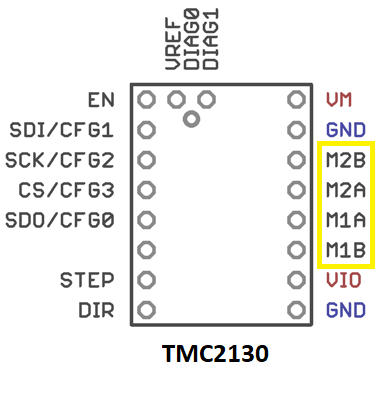
Cerco di essere più preciso, grazie ai tuoi consigli: La piedinatura del BTT TMC2130 v3 è la seguente (diversa da quella inserita nel mio precedente post che era di un'altra versione/produttore evidentemente) Quindi, confermando l'ordine in cui sono collegati i fili, allo stato il mio cablaggio è il seguente: 2B -> Nero -> D 1B -> Verde -> C 1A -> Blu -> A 2A -> Rosso -> B Ovvero, nell'ordine che mi hai proposto: 1A Blu A 1B Verde C 2A Rosso B 2B Nero D Mi sembra di capire che dovrei invertire tutti i cavi verdi con i rossi, right? Ma come è possibile che funzioni tutto ugualmente?
-
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
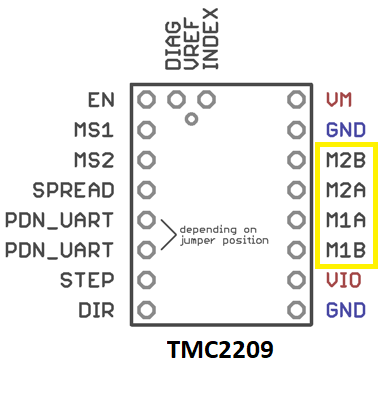
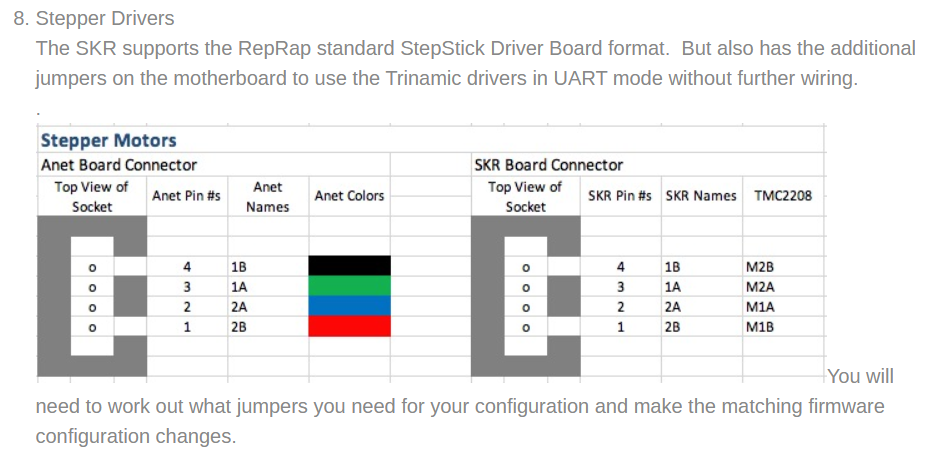
Ammetto di essere alle prime armi, sto approfittando di questa discussione per imparare. Ho riverificato tutti i cablaggi, tutti i motori hanno un pin a 6 uscite, di cui non vengono usati solo il 2 ed il 5 come desumibile da questa immagine: Ho quindi controllato i cavi, tutti sono connessi ai motori nell'ordine Blu, Verde, Rosso, Nero. Tutti sono connessi alla scheda madre nell'ordine Nero, Verde, Blu, Rosso. Inoltre mi sembra, confrontando i pinout dei driver 2209 e 2130, che abbiano gli stessi pin per le connessioni ai motori: Mi confermate che non sto sbagliando nulla?
-
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Avevo seguito questa procedura: VREF = (RMSCurrent x 2,5 ) / 1,77 Il modello degli stepper motor è 42SHDC3025-24B che hanno i seguenti parametri: Rated current 0.9A <---Il dato che ci interessa per la formula Per ottenere la RMSCurrent dalla Massima, basta dividerla per 1,41 quindi: RMSCurrent = 0,9 / 1,41 = 0,638 La mia formula, quindi è: VREF = 0.638 x 2,5 / 1,77 = 0,90 Di cui ho impostato solo il 90%, pari a 0,811 come spiegato qui: https://www.youtube.com/watch?v=OUadiW5QLBE -
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
il sito di caggius era stato uno dei miei riferimenti per il ricablaggio, infatti a questa pagina https://caggius.wordpress.com/anet-a8-rewiring-for-skr1-3/ viene specificato che non c'è bisogno di fare modifiche (solo che lui usa i TMC2209 e non i TMC2130): Adesso provo ad abbassare la VREF a 256mA (invece di 700) per i motori x e Y, mi confermate che le voci da interessare sono X_CURRENT e Y_CURRENT ? #if HAS_TRINAMIC_CONFIG #define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current #define INTERPOLATE true // Interpolate X/Y/Z_MICROSTEPS to 256 #if AXIS_IS_TMC(X) #define X_CURRENT 700 // (mA) RMS current. Multiply by 1.414 for peak current. #define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing #define X_MICROSTEPS 16 // 0..256 #define X_RSENSE 0.11 #define X_CHAIN_POS -1 // <=0 : Not chained. 1 : MCU MOSI connected. 2 : Next in chain, ... #endif #if AXIS_IS_TMC(Y) #define Y_CURRENT 700 #define Y_CURRENT_HOME Y_CURRENT #define Y_MICROSTEPS 16 #define Y_RSENSE 0.11 #define Y_CHAIN_POS -1 #endif
-
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
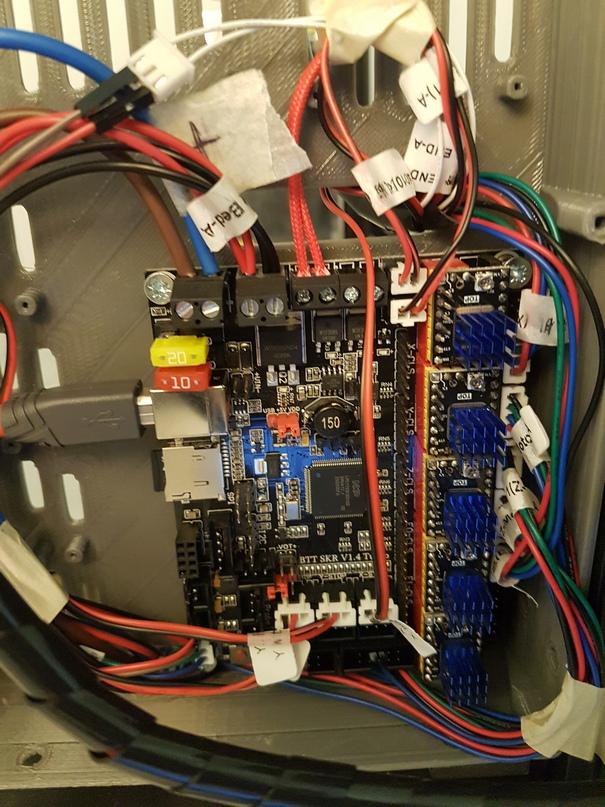
il codice dei motori è 42SHDC3025-24B che hanno i seguenti parametri: Holding Torque 40 N·cm Rated voltage 3.96 V Shaft Ø 5 mm Single Step angle 1.8° Motor length 40 mm Rated current 0.9A Per quanto riguarda i cavi non ho fatto alcuna variazione rispetto a quelli già previsti sulla scheda madre Anet originale:
-
Anet A8 Plus (SKR 1.4 turbo e TMC2130) - Layer shifting sistematico
wildsharkg ha risposto a wildsharkg nella discussione Problemi generici o di qualità di stampa
Mi sembrava di aver risposto a tutte, quali mi sono perso? Inviato dal mio SM-G930F utilizzando Tapatalk