Robocop
-
Numero contenuti
17 -
Iscritto
-
Ultima visita
Obiettivi di Robocop
")
Newbie (1/14)
2
Reputazione Forum
-
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Buona sera....certo posso smontarla e vedere se trovo qualche scritta da qualche parte....ma guardando in giro online non sembrano esserci molte indicazioni al riguardo. guarda.....sinceramente ho sempre stampato senza, quindi mentirei nel dirti che non ne posso fare a meno.....è diventata più una questione di principio... non è possibile che sia tutto corretto e non lo riesca a far funzionare......vorrei cercar di capire! 😉 !! ok.....purtroppo adesso le verifiche del pin D2 non le riesco a fare almeno fino a lunedì sera. Per lo schema ti ringrazio molto per averlo fatto aggiornare...almeno da tutto questo alla fine qualcosa di buono è uscito....credo! I due BLTouch che ho comprato sono entrambi originali di ANTCLABS, e se inquadro il QRCode mi rimanda al loro sito. Sono in trepida attesa di sentire cosa ti risponderanno. Per tutto il resto concordo con te! Grazie ancora a tutti per la partecipazione alla conversazione. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
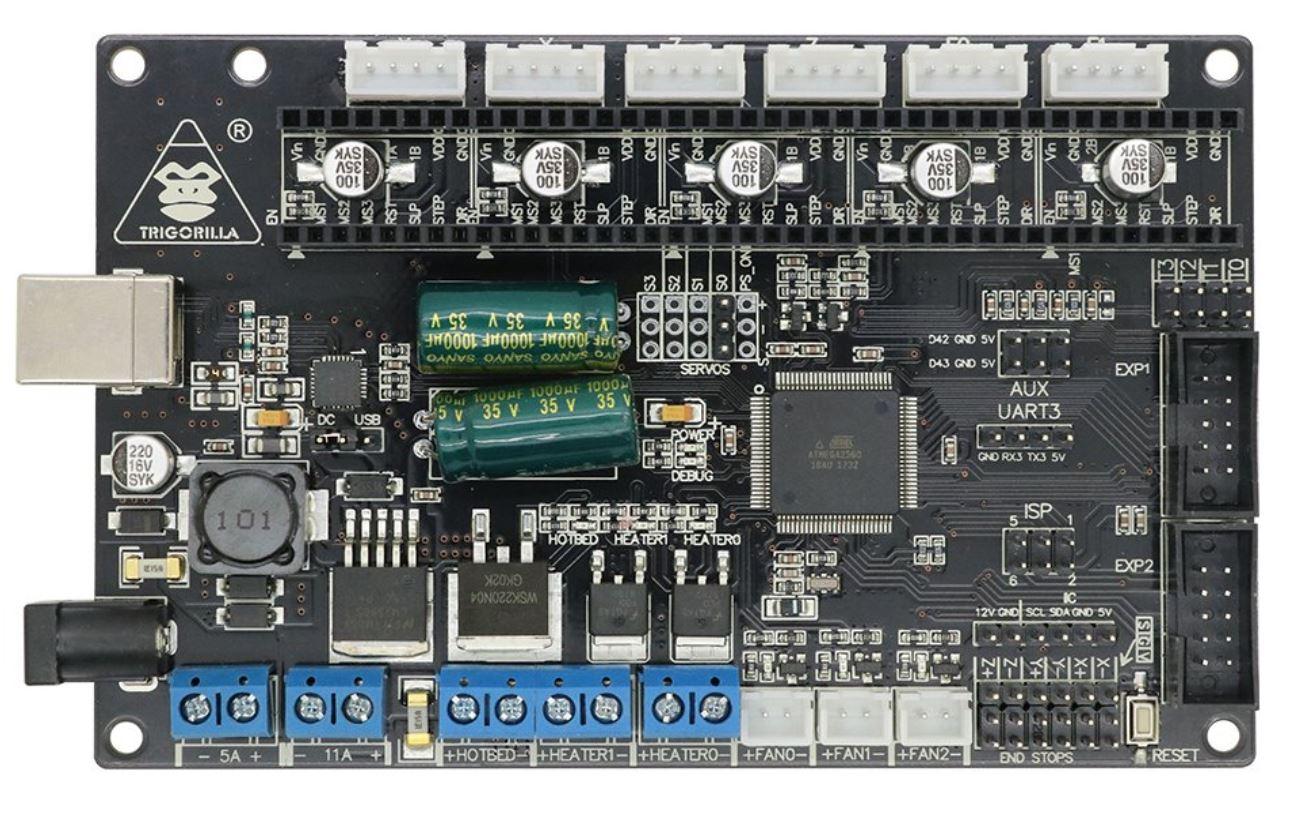
Comunque ragazzi....se è tutto corretto cosa potrei tentar di fare?! Secondo voi esiste qualche altro pin libero sul quale mi posso collegare per fare il test? In una delle guide che mi avete mandato si parla di rimuovere componenti saldati dalla scheda....ma si parla sempre della trigorilla versione 1.1...come faccio ad avere la certezza al 100% della versione della scheda?! Nei post precedenti ho detto di non aver la trigorilla versione 1.1 perchè nel file di Marlin ho impostato il parametro TRIGORILLA_VERSION a 0 che è stato l'unico modo che ho trovato per poter comandare il sensore (senza questa impostazione non riuscivo neppure a comandare l'uscita dell'asta del sensore). Sostituire in toto la scheda madre mi sembra una soluzione drastica....in fin dei conti funziona tutto!!! L'unica motivazione che posso trovare per sostituire la scheda madre è quella di passare ad un 32bit (teoricamente la trigorilla standard dovrebbe essere ad 8bit)....ma sinceramente non ne vedo l'utilità. Grazie a tutti per le risposte. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
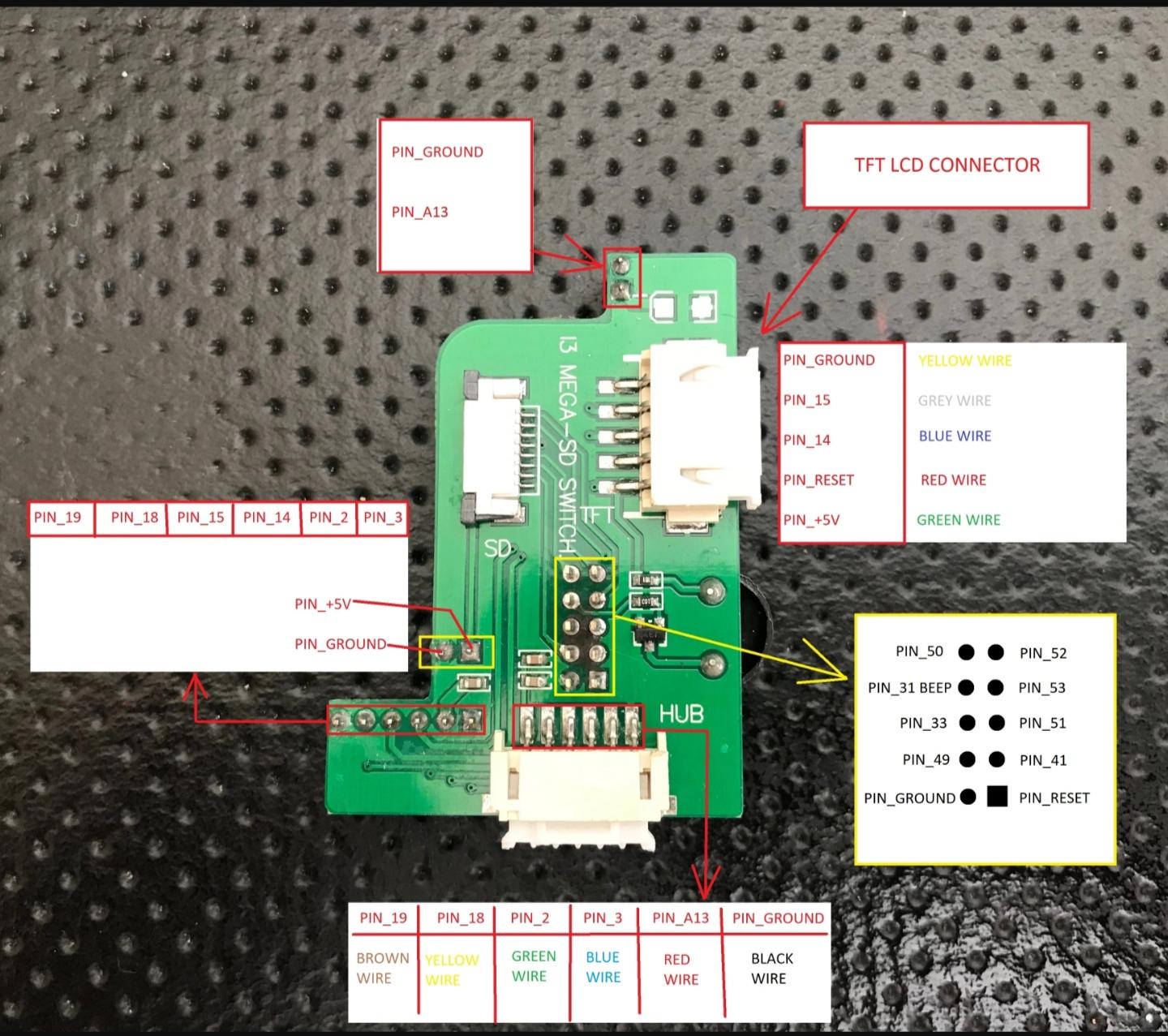
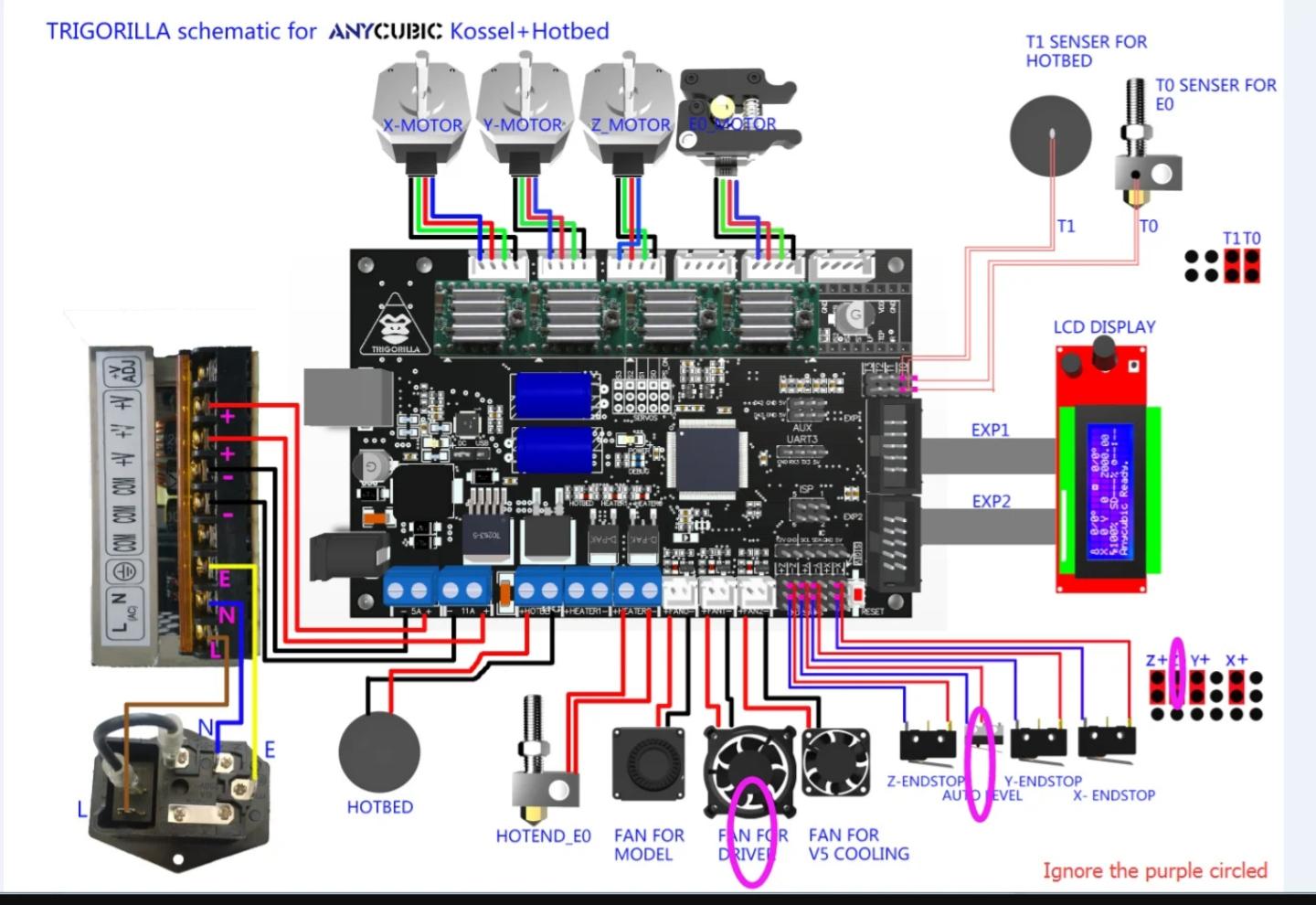
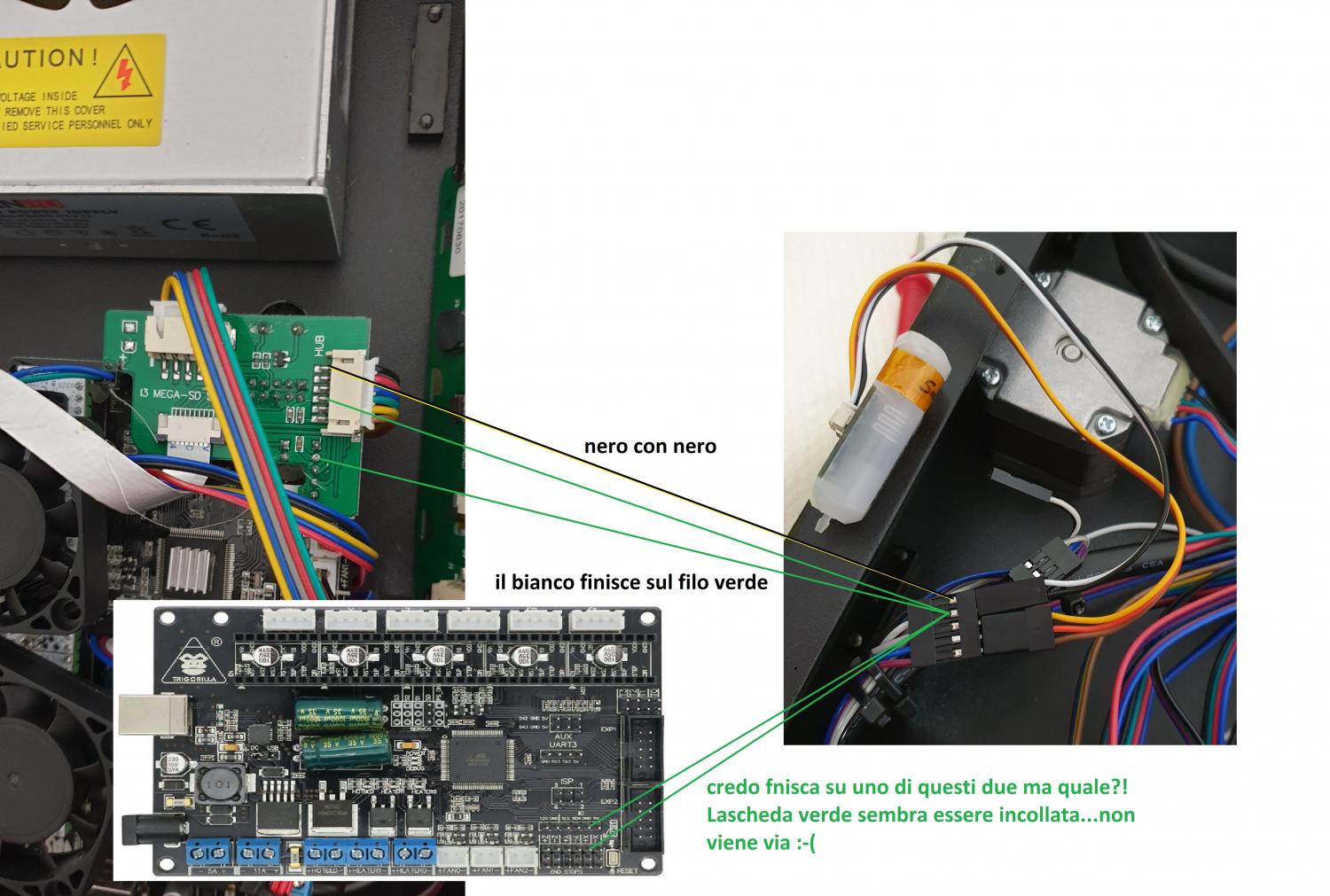
Cercando su internet "HUB anycubic i3 mega" mi sono imbattuto in questa discussione dove si parla di tutt'altro ed ho trovato le seguenti immagini. Questo è il link alla conversazione: https://www.thingiverse.com/groups/anycubic-i3-mega/forums/general/topic:34265 Queste immagini confermano che sul filo verde abbiamo il pin D2.
-
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Buona sera. Ti ringrazio per la risposta. Io ti confermo al 100% che il filo bianco del BLTouch finisce sul filo verde della scheda della trigorilla (poi io non so se il filo verde della trigorilla corrisponde ad X+ (D2).....sembrerebbe di si!). E ti confermo al 100% che il filo nero del BLTouch finisce su GND....toccando con il tester il filo nero del BLTouch e un qualsiasi GND della scheda, ma anche dell'alimentatore, ho continuità....quindi il collegamento del GND è confermato al 100%. Ti ringrazio per aver scritto ad Antclabs. Io non so davvero cosa fare....sia il software sia l'hardware a me sembrano tutti giusti. Grazie ancora. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
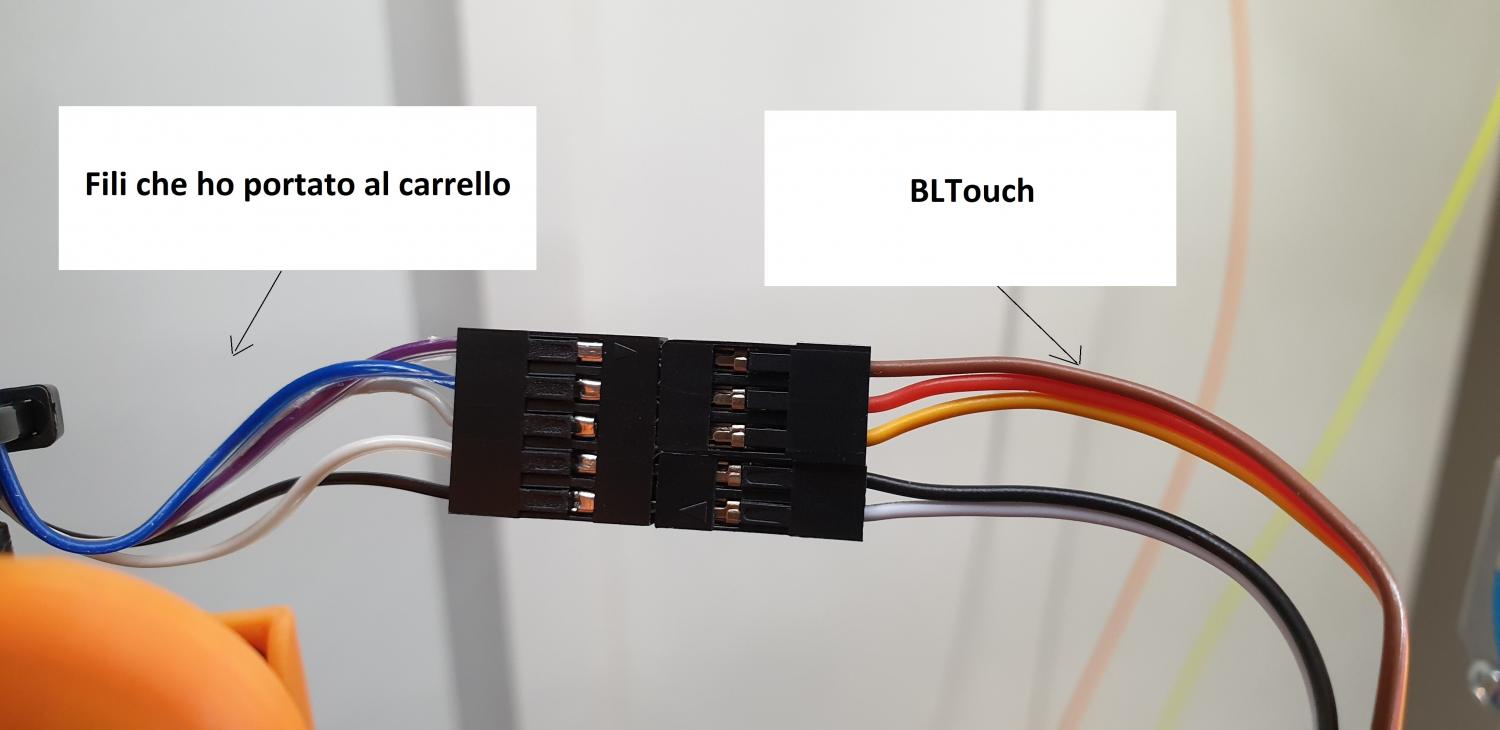
Buongiorno, questo schema è davvero bello...grazie per avermelo postato. L'inversione di colore bianco nero del BLTouch l'ho fatta perché, come si vede nei 3 video del post precedente dovremmo essere in questa condizione: - i fili giallo e bianco che arrivano al carrello, secondo il tester, dovrebbero essere rispettivamente GND bianco e + 5V il giallo. Nelle connessione ho lasciato il bianco come GND esattamente come sul carrello e alla fine ho semplicemente invertito il cavetto del BLTouch che invece porta il GND sul nero ed il segnale sul Bianco. Spero di nn aver fatto casino qui.... Comunque se vuoi provo ad invertire i cavetti del BLTouch e a fare il test con i cavi invertiti! -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
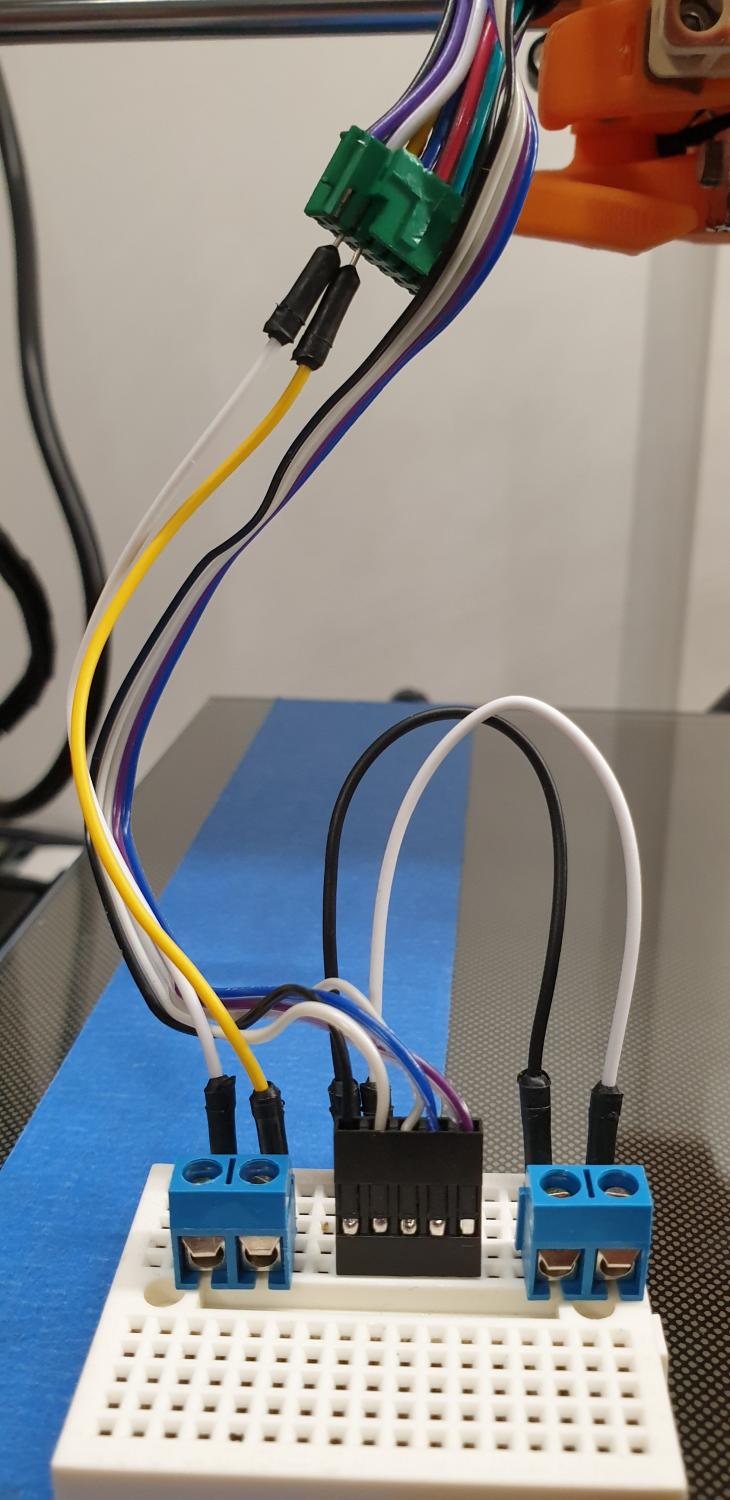
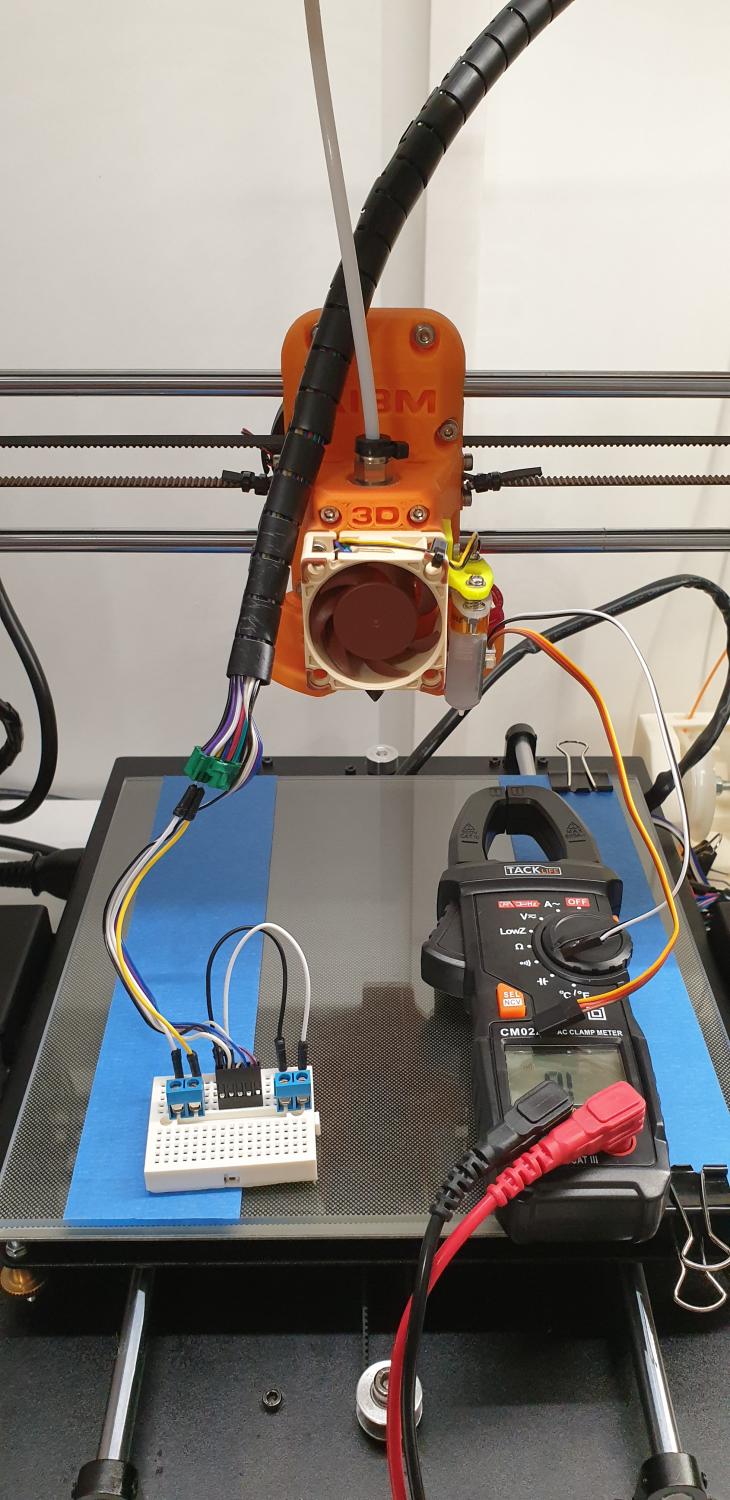
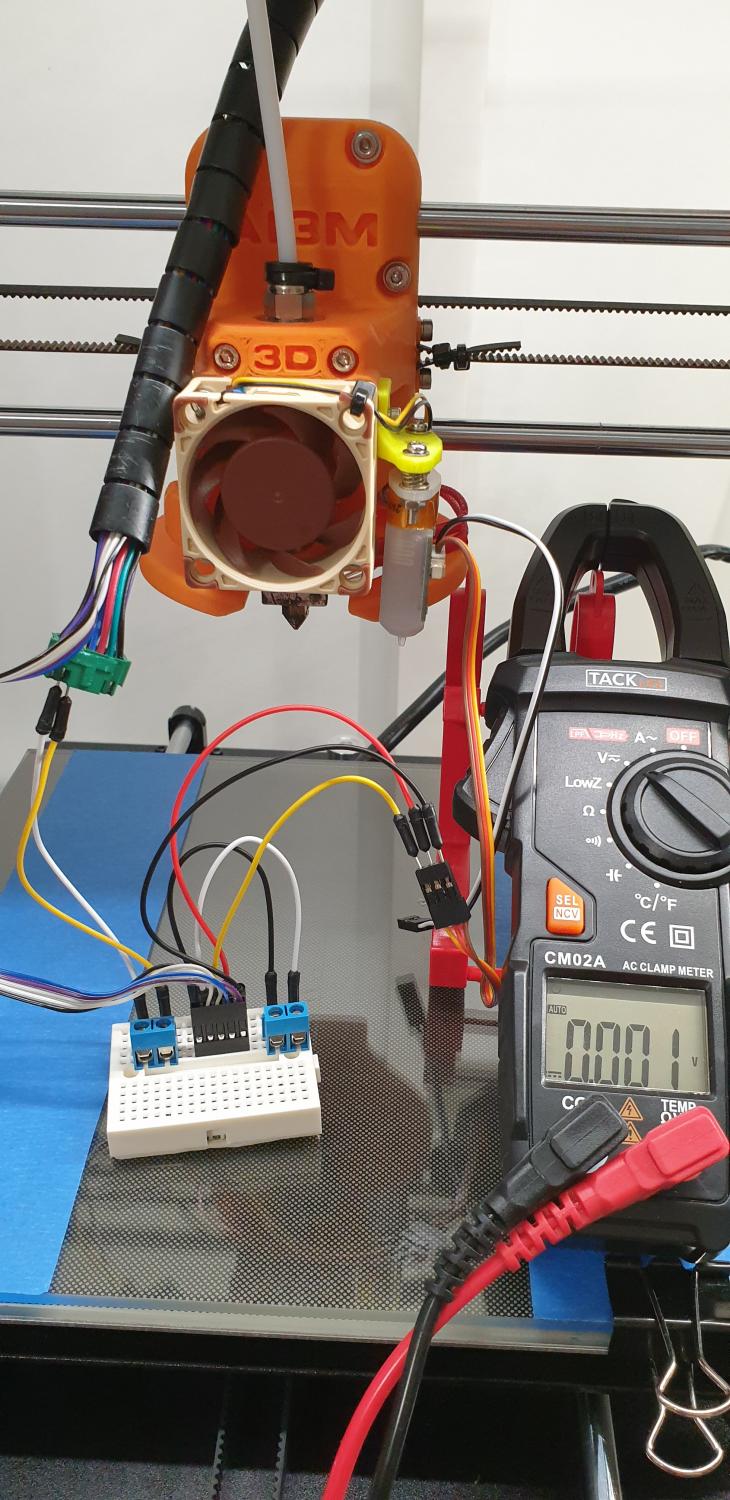
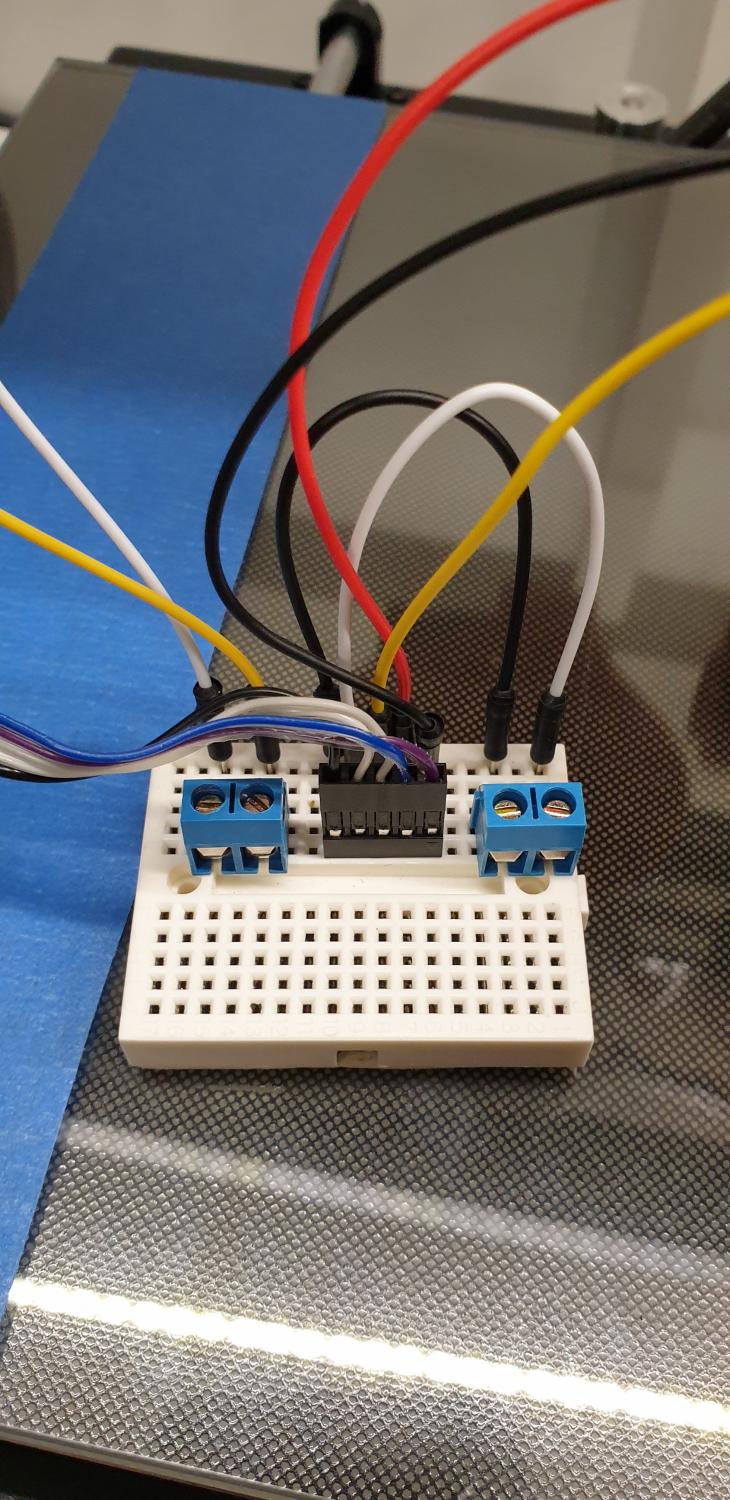
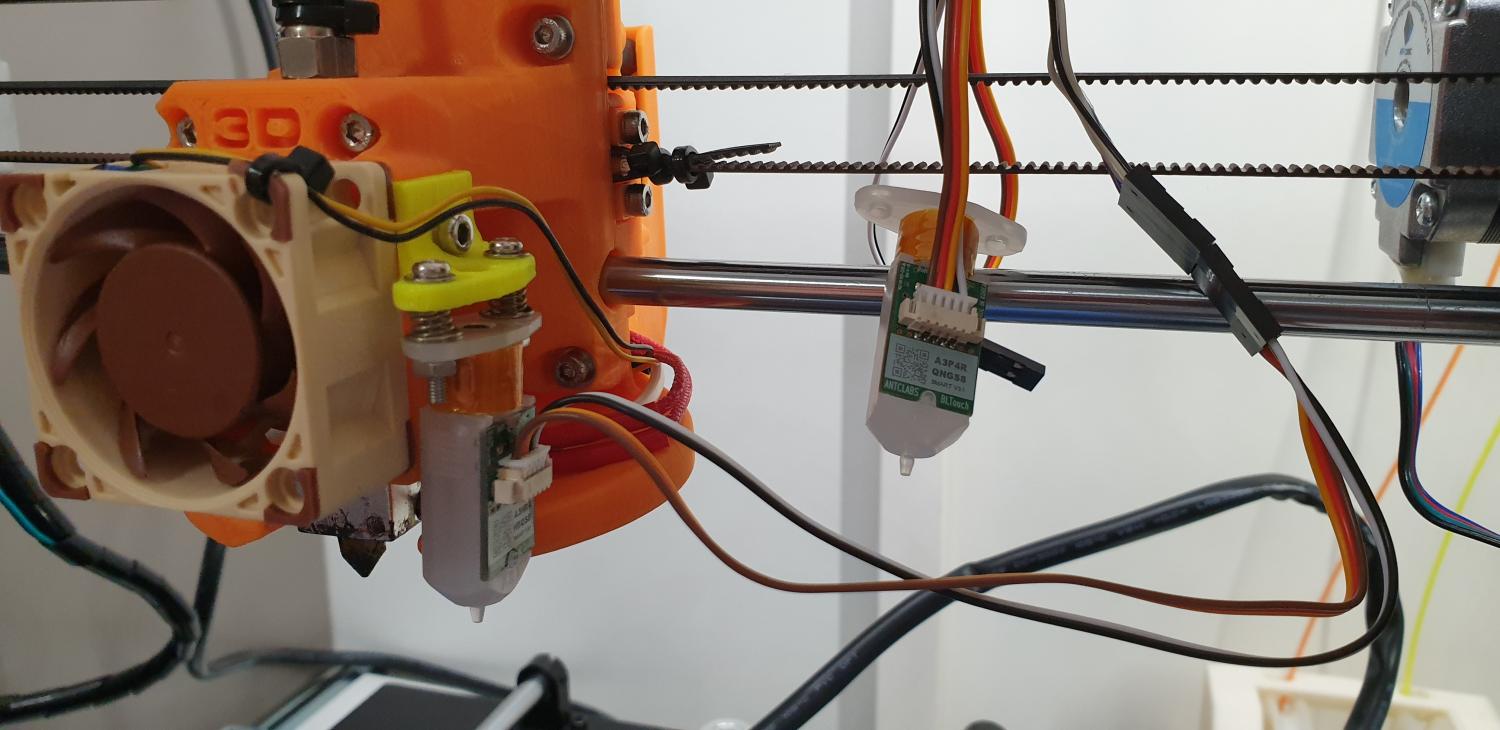
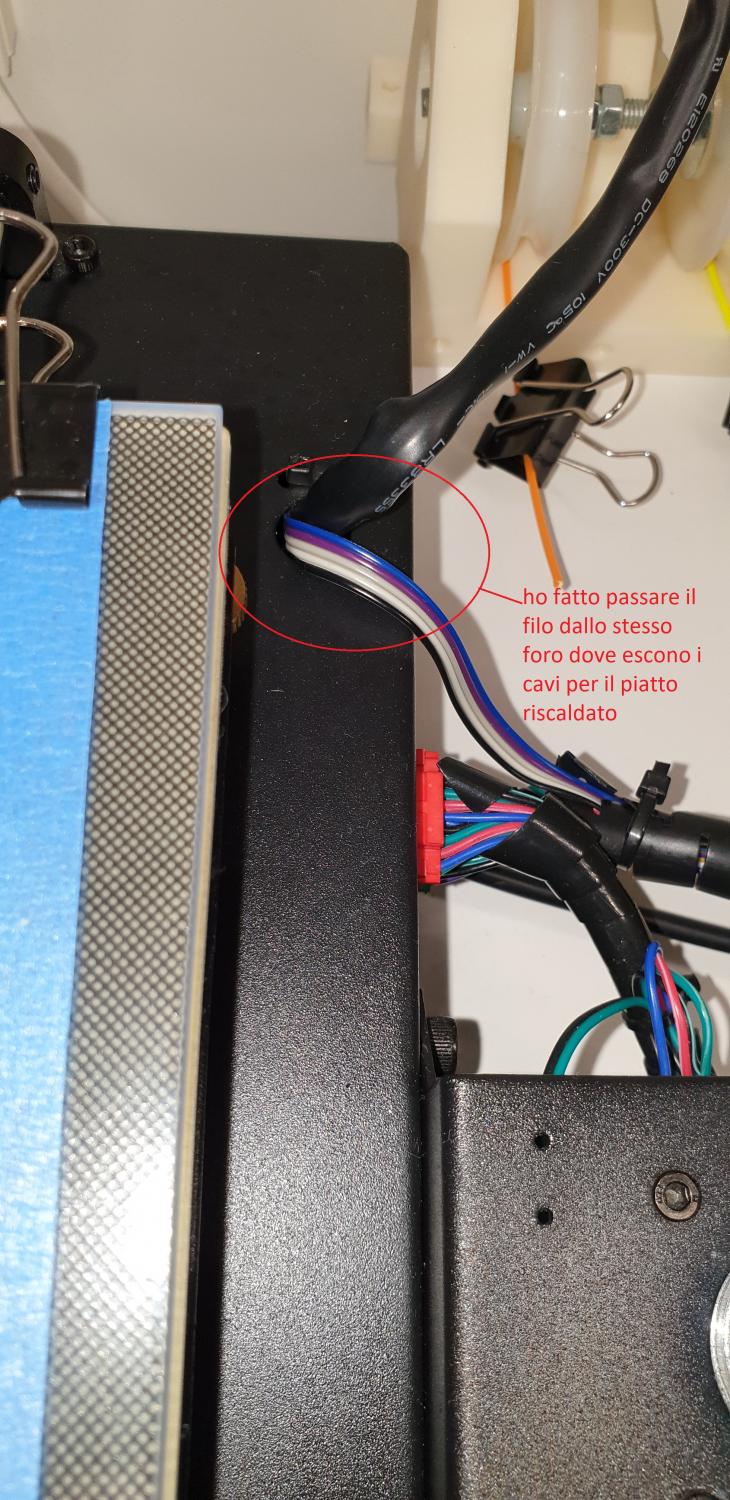
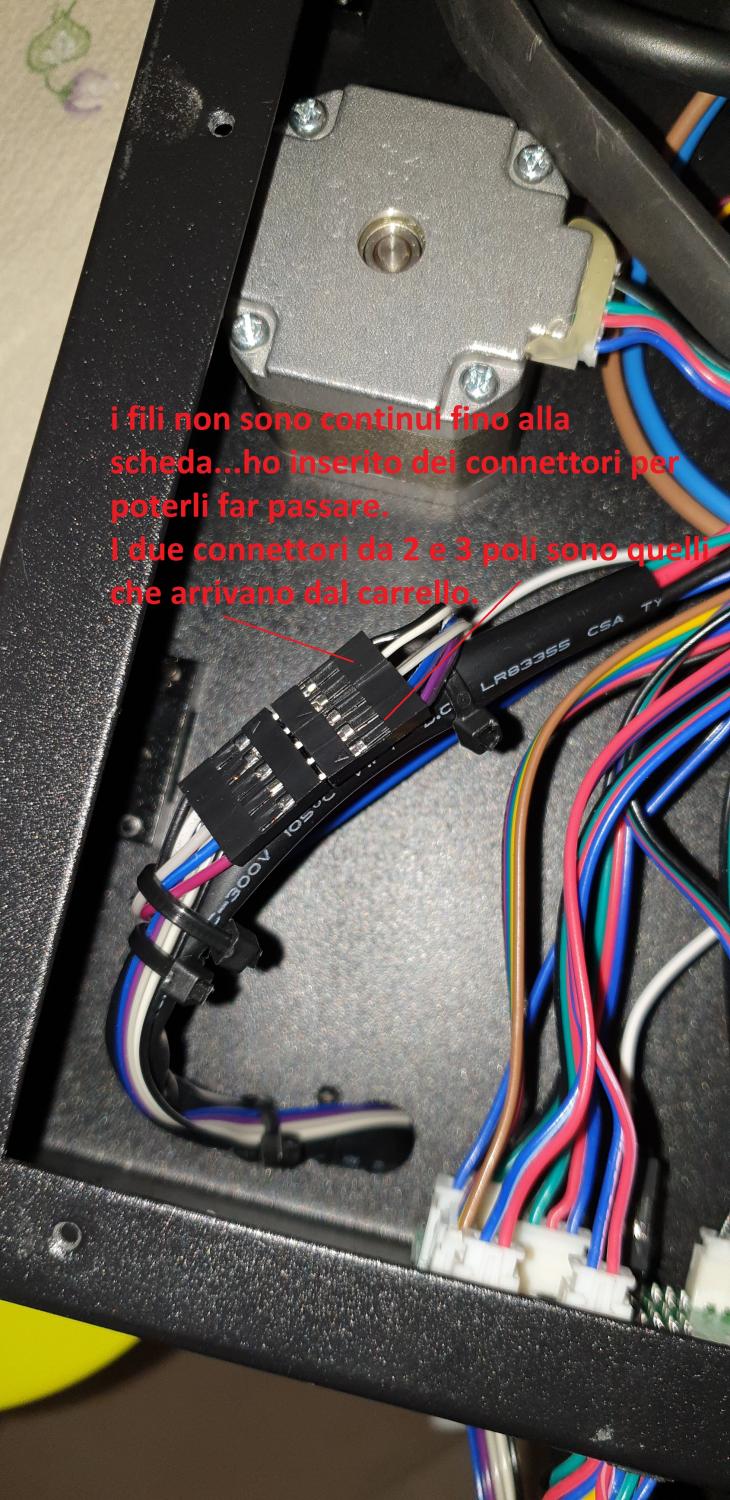
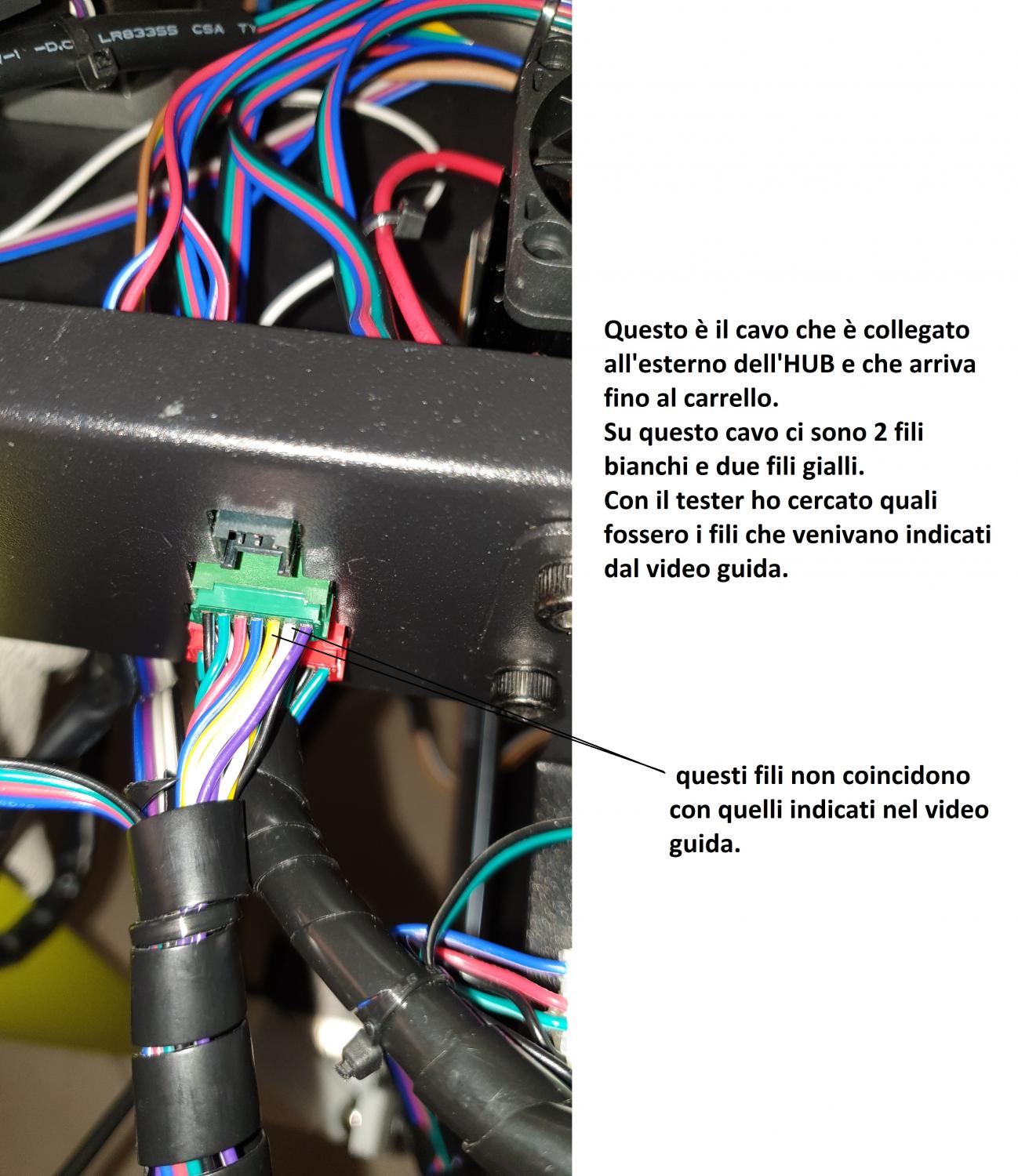
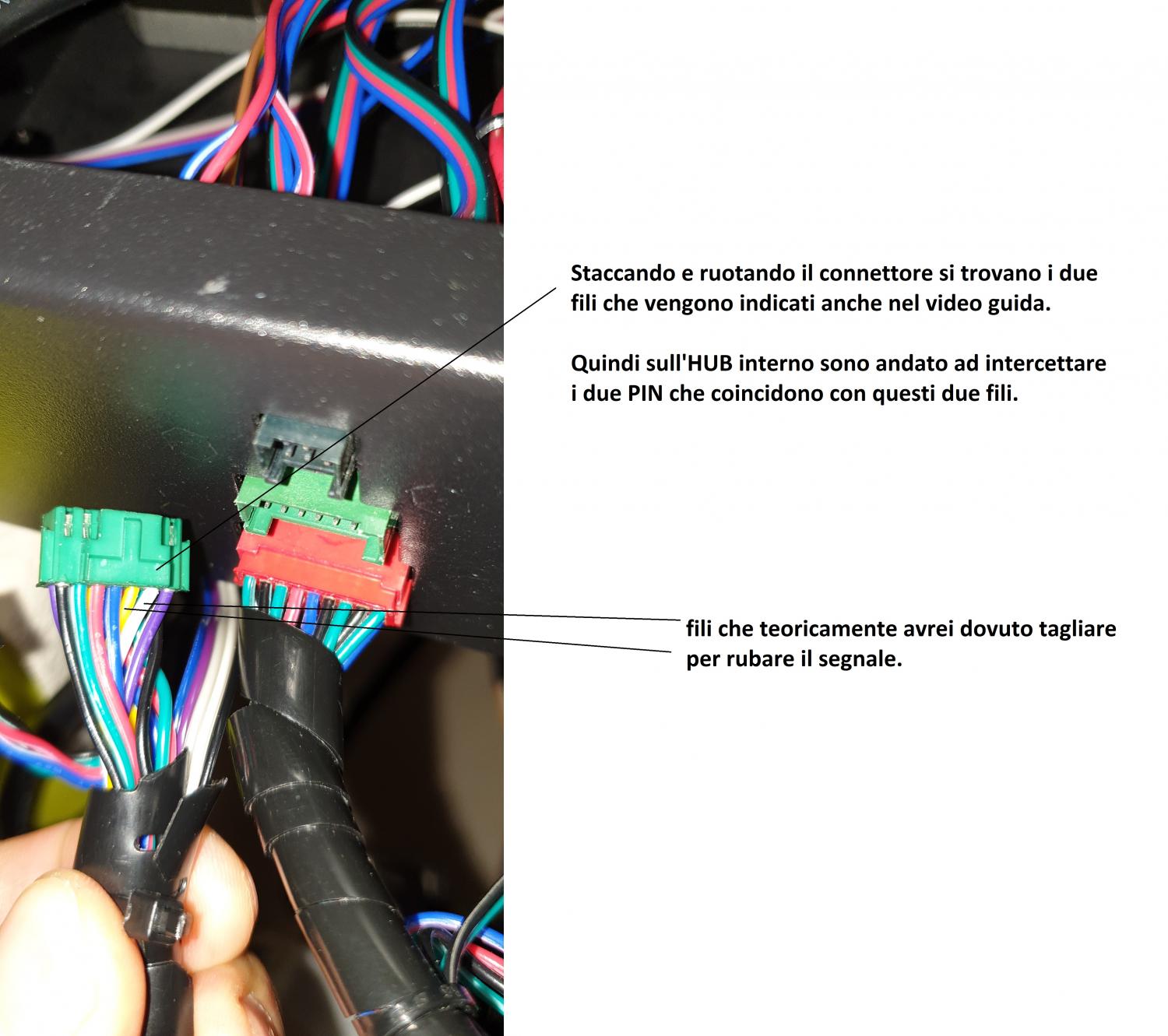
Buona sera a tutti, ho girato 3 video per mostrare la continuità dei fili ed il loro collegamento alla scheda madre. Sono partito dalla ricerca della continuità dei fili sul carrello (video 1), fino ad arrivare alla scheda madre (video 3). Ho inoltre cercato\verificato quale tensione mi trovo sui pin che ho collegato (video 2). Vi lascio anche le foto che ho fatto che dovrebbero, assieme ai video, aiutare ad identificare i colori. VIDEO 1 VIDEO 2 VIDEO 3 Ci tengo a precisare due cose: - non ho la trigorilla 1.1, infatti nel firmware ho impostato TRIGORILLA_VERSION 0, altrimenti non sarei neppure riuscito a comandare il sensore. - mi sono collegato sui fili del carrello giallo e bianco perchè il video guida diceva di fare così. Se guardo i PIN della trigorilla sembra che in realtà la connessione finisca su un pin di X+ o GND (anche se escluderei GND), solo che la scheda verde sembra essere incollata e quindi non ho potuto verificare. Grazie a tutti per la pazienza e per il vostro aiuto.
-
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Sicuramente è un'ottima idea andare diretti sulla scheda madre....ma dove devo collegare i due fili bianco e nero del BLTouch?! Cioè mentre i cavi per comandare la sonda, marrone rosso e giallo, hanno fisicamente 3 poli su cui devono essere posizionati (che tra le altre cose credo di non aver sbagliato altrimenti non sarebbe "utilizzabile" così come faccio io con i vari comandi), i due cavetti bianco e nero dove li posiziono sulla trigorilla?! Comunque questa sera cerco di fare tutte le verifiche del caso! -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Ciao... Ok ti ringrazio per i consigli... Questa sera cerco di fare tutte le verifiche e cerco di riportare i risultati qui. Grazie ancora -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Buona sera a tutti. a seguito dei consigli sopra riportati il risultato è il seguente. Nel video si vede lo zero nella mezzeria del piatto, ed il comando M43 S. https://youtu.be/XfZ7N2ULyIQ Questa è un'altra guida che descrive più o meno quello che si vede nel video: https://cdn.thingiverse.com/assets/58/ab/fd/e6/1b/BLTouch_on_Anycubic_I3_Mega.pdf Qui di seguito vi lascio l'estrazione del PINS_DEBUG AVVIO start echo: External Reset Marlin 1.1.9 Marlin-AI3M v1.4.6 echo: Last Updated: 2019-12-20 | Author: (lucabarsanti) echo:Compiled: Jun 29 2020 echo: Free Memory: 1254 PlannerBufferBytes: 1664 echo:V55 stored settings retrieved (731 bytes; crc 11622) echo: G21 ; (mm) echo:Filament settings: Disabled echo: M200 D1.75 echo: M200 D0 echo:Steps per unit: echo: M92 X80.00 Y80.00 Z400.00 E92.60 echo:Maximum feedrates (units/s): echo: M203 X500.00 Y500.00 Z10.00 E60.00 echo:Maximum Acceleration (units/s2): echo: M201 X3000 Y2000 Z60 E10000 echo:Acceleration (units/s2): P<print_accel> R<retract_accel> T<travel_accel> echo: M204 P1500.00 R3000.00 T3000.00 echo:Advanced: Q<min_segment_time_us> S<min_feedrate> T<min_travel_feedrate> X<max_x_jerk> Y<max_y_jerk> Z<max_z_jerk> E<max_e_jerk> echo: M205 Q20000 S0.00 T0.00 X8.00 Y8.00 Z0.40 E5.00 echo:Home offset: echo: M206 X0.00 Y0.00 Z0.00 echo:Auto Bed Leveling: echo: M420 S0 Z0.00 echo: G29 W I0 J0 Z0.00000 echo: G29 W I1 J0 Z0.00000 echo: G29 W I2 J0 Z0.00000 echo: G29 W I3 J0 Z0.00000 echo: G29 W I4 J0 Z0.00000 echo: G29 W I0 J1 Z0.00000 echo: G29 W I1 J1 Z0.00000 echo: G29 W I2 J1 Z0.00000 echo: G29 W I3 J1 Z0.00000 echo: G29 W I4 J1 Z0.00000 echo: G29 W I0 J2 Z0.00000 echo: G29 W I1 J2 Z0.00000 echo: G29 W I2 J2 Z0.00000 echo: G29 W I3 J2 Z0.00000 echo: G29 W I4 J2 Z0.00000 echo: G29 W I0 J3 Z0.00000 echo: G29 W I1 J3 Z0.00000 echo: G29 W I2 J3 Z0.00000 echo: G29 W I3 J3 Z0.00000 echo: G29 W I4 J3 Z0.00000 echo: G29 W I0 J4 Z0.00000 echo: G29 W I1 J4 Z0.00000 echo: G29 W I2 J4 Z0.00000 echo: G29 W I3 J4 Z0.00000 echo: G29 W I4 J4 Z0.00000 echo:Endstop adjustment: echo: M666 Z0.00 echo:PID settings: echo: M301 P15.94 I1.17 D54.19 echo: M304 P251.78 I49.57 D319.73 echo:Z-Probe Offset (mm): echo: M851 Z-1.50 echo:Linear Advance: echo: M900 K0.00 echo:Filament load/unload lengths: echo: M603 L538.00 U555.00 echo:SD card ok echo:SD card ok COMANDO M43 S (CHE SI VEDE ANCHE NEL VIDEO) Servo probe test . using index: 0 . deploy angle: 10 . stow angle: 90 . probe uses Z_MIN_PROBE_PIN: 2 . uses Z_MIN_PROBE_ENDSTOP_INVERTING (ignores Z_MIN_ENDSTOP_INVERTING) . Z_MIN_PROBE_ENDSTOP_INVERTING: false . deploy & stow 4 times please trigger probe trigger not detected ok COMANDO M43 PIN: 0 Port: E0 RXD protected PIN: 1 Port: E1 TXD protected PIN: 2 Port: E4 Z_MIN_PROBE_PIN protected PIN: 3 Port: E5 X_MIN_PIN protected PIN: 4 Port: G5 <unused/unknown> Input = 1 TIMER0B PWM: 128 WGM: 3 COM0B: 0 CS: 3 TCCR0A: 3 TCCR0B: 3 TIMSK0: 5 compare interrupt enabled overflow interrupt enabled PIN: 5 Port: E3 SERVO2_PIN Output = 0 TIMER3A PWM: -25536 WGM: 0 COM3A: 0 CS: 2 TCCR3A: 0 TCCR3B: 2 TIMSK3: 2 non-standard PWM mode compare interrupt enabled PIN: 6 Port: H3 SERVO1_PIN Output = 0 TIMER4A PWM: 0 WGM: 1 COM4A: 0 CS: 3 TCCR4A: 1 TCCR4B: 3 TIMSK4: 0 PIN: 7 Port: H4 CONTROLLER_FAN_PIN protected PIN: 8 Port: H5 HEATER_BED_PIN protected PIN: 9 Port: H6 FAN_PIN protected PIN: 10 Port: B4 HEATER_0_PIN protected PIN: 11 Port: B5 SERVO0_PIN Output = 0 TIMER1A PWM: 2000 WGM: 4 COM1A: 0 CS: 2 TCCR1A: 0 TCCR1B: 10 TIMSK1: 2 non-standard PWM mode compare interrupt enabled PIN: 12 Port: B6 <unused/unknown> Input = 1 TIMER1B PWM: 0 WGM: 4 COM1B: 0 CS: 2 TCCR1A: 0 TCCR1B: 10 TIMSK1: 2 non-standard PWM mode PIN: 13 Port: B7 LED_PIN Input = 0 TIMER0A PWM: 0 WGM: 3 COM0A: 0 CS: 3 TCCR0A: 3 TCCR0B: 3 TIMSK0: 5 overflow interrupt enabled . TIMER1C is also tied to this pin TIMER1C PWM: 0 WGM: 4 COM1C: 0 CS: 2 TCCR1A: 0 TCCR1B: 10 TIMSK1: 2 non-standard PWM mode PIN: 14 Port: J1 <unused/unknown> Input = 1 PIN: 15 Port: J0 <unused/unknown> Input = 1 PIN: 16 Port: H1 <unused/unknown> Input = 1 PIN: 17 Port: H0 <unused/unknown> Input = 0 PIN: 18 Port: D3 Z_MIN_PIN protected PIN: 19 Port: D2 FIL_RUNOUT_PIN Input = 0 PIN: 20 Port: D1 <unused/unknown> Input = 1 PIN: 21 Port: D0 <unused/unknown> Input = 1 PIN: 22 Port: A0 <unused/unknown> Input = 0 PIN: 23 Port: A1 <unused/unknown> Input = 0 PIN: 24 Port: A2 E0_ENABLE_PIN protected PIN: 25 Port: A3 <unused/unknown> Input = 0 PIN: 26 Port: A4 E0_STEP_PIN protected PIN: 27 Port: A5 <unused/unknown> Input = 0 PIN: 28 Port: A6 E0_DIR_PIN protected PIN: 29 Port: A7 <unused/unknown> Input = 0 PIN: 30 Port: C7 Y2_ENABLE_PIN protected . Z2_ENABLE_PIN protected PIN: 31 Port: C6 BEEPER_PIN Output = 0 PIN: 32 Port: C5 <unused/unknown> Input = 1 PIN: 33 Port: C4 <unused/unknown> Input = 0 PIN: 34 Port: C3 Y2_DIR_PIN protected . Z2_DIR_PIN protected PIN: 35 Port: C2 <unused/unknown> Input = 0 PIN: 36 Port: C1 Y2_STEP_PIN protected . Z2_STEP_PIN protected PIN: 37 Port: C0 <unused/unknown> Input = 0 PIN: 38 Port: D7 X_ENABLE_PIN protected PIN: 39 Port: G2 <unused/unknown> Input = 1 PIN: 40 Port: G1 <unused/unknown> Input = 1 PIN: 41 Port: G0 KILL_PIN Input = 1 PIN: 42 Port: L7 Y_MIN_PIN protected PIN: 43 Port: L6 X_MAX_PIN protected PIN: 44 Port: L5 E0_AUTO_FAN_PIN protected . FAN2_PIN protected . ORIG_E0_AUTO_FAN_PIN protected PIN: 45 Port: L4 HEATER_1_PIN Output = 0 TIMER5B PWM: 0 WGM: 1 COM5B: 0 CS: 3 TCCR5A: 1 TCCR5B: 3 TIMSK5: 0 PIN: 46 Port: L3 Z_STEP_PIN protected PIN: 47 Port: L2 <unused/unknown> Input = 1 PIN: 48 Port: L1 Z_DIR_PIN protected PIN: 49 Port: L0 SD_DETECT_PIN Input = 0 PIN: 50 Port: B3 AVR_MISO_PIN Input = 1 . MISO_PIN Input = 1 PIN: 51 Port: B2 AVR_MOSI_PIN Output = 1 . MOSI_PIN Output = 1 PIN: 52 Port: B1 AVR_SCK_PIN Output = 0 . SCK_PIN Output = 0 PIN: 53 Port: B0 AVR_SS_PIN Output = 1 . SDSS Output = 1 . SS_PIN Output = 1 PIN: 54 Port: F0 (A 0) X_STEP_PIN protected PIN: 55 Port: F1 (A 1) X_DIR_PIN protected PIN: 56 Port: F2 (A 2) Y_ENABLE_PIN protected PIN: 57 Port: F3 (A 3) <unused/unknown> Analog in = 518 Input = 0 PIN: 58 Port: F4 (A 4) <unused/unknown> Analog in = 0 Input = 0 PIN: 59 Port: F5 (A 5) <unused/unknown> Analog in = 606 Input = 1 PIN: 60 Port: F6 (A 6) Y_STEP_PIN protected PIN: 61 Port: F7 (A 7) Y_DIR_PIN protected PIN: 62 Port: K0 (A 8 ) Z_ENABLE_PIN protected PIN: 63 Port: K1 (A 9) <unused/unknown> Analog in = 825 Input = 1 PIN: 64 Port: K2 (A10) <unused/unknown> Analog in = 724 Input = 1 PIN: 65 Port: K3 (A11) <unused/unknown> Analog in = 831 Input = 1 PIN: 66 Port: K4 (A12) TEMP_2_PIN Analog in = 75 PIN: 67 Port: K5 (A13) TEMP_0_PIN protected PIN: 68 Port: K6 (A14) TEMP_BED_PIN protected PIN: 69 Port: K7 (A15) TEMP_1_PIN Analog in = 1023 ok Spero sia tutto abbastanza chiaro. Grazie a tutti. Qui di seguito vi mostro i collegamenti: Pin Debug.txt
-
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
eh.....pensavo che come sulle macchine professionali, esistono i fine corsa meccanici che staccano la corrente, e poi esistono i sensori che lavorano per conto loro. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
questa sera vi farò una foto di come ho collegato i fili..... comunque da quello che avevo capito, sulla anycubic i3 mega il BLTouch non sarebbe dovuto andato in sostituzione dei fine corsa degli assi Z, cioè in teoria il BLTouch dovrebbe vivere in parallelo ai fine corsa. Ma magari ho capito male. Lo Z offset cercherò di sistemarlo....ma come scritto sopra lo Z zero virtuale del software non sembra funzionare lanciando la sequenza di comandi che viene descritta nel video che mi avete girato. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
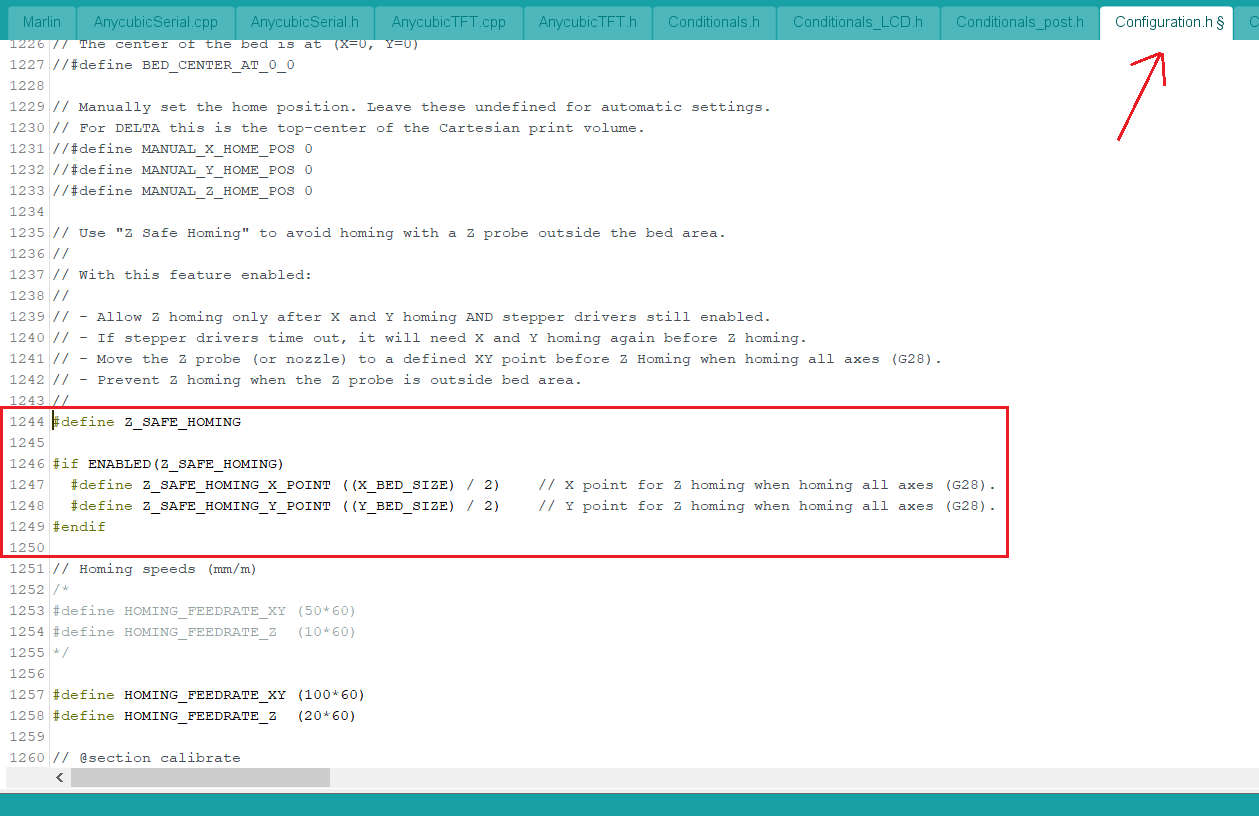
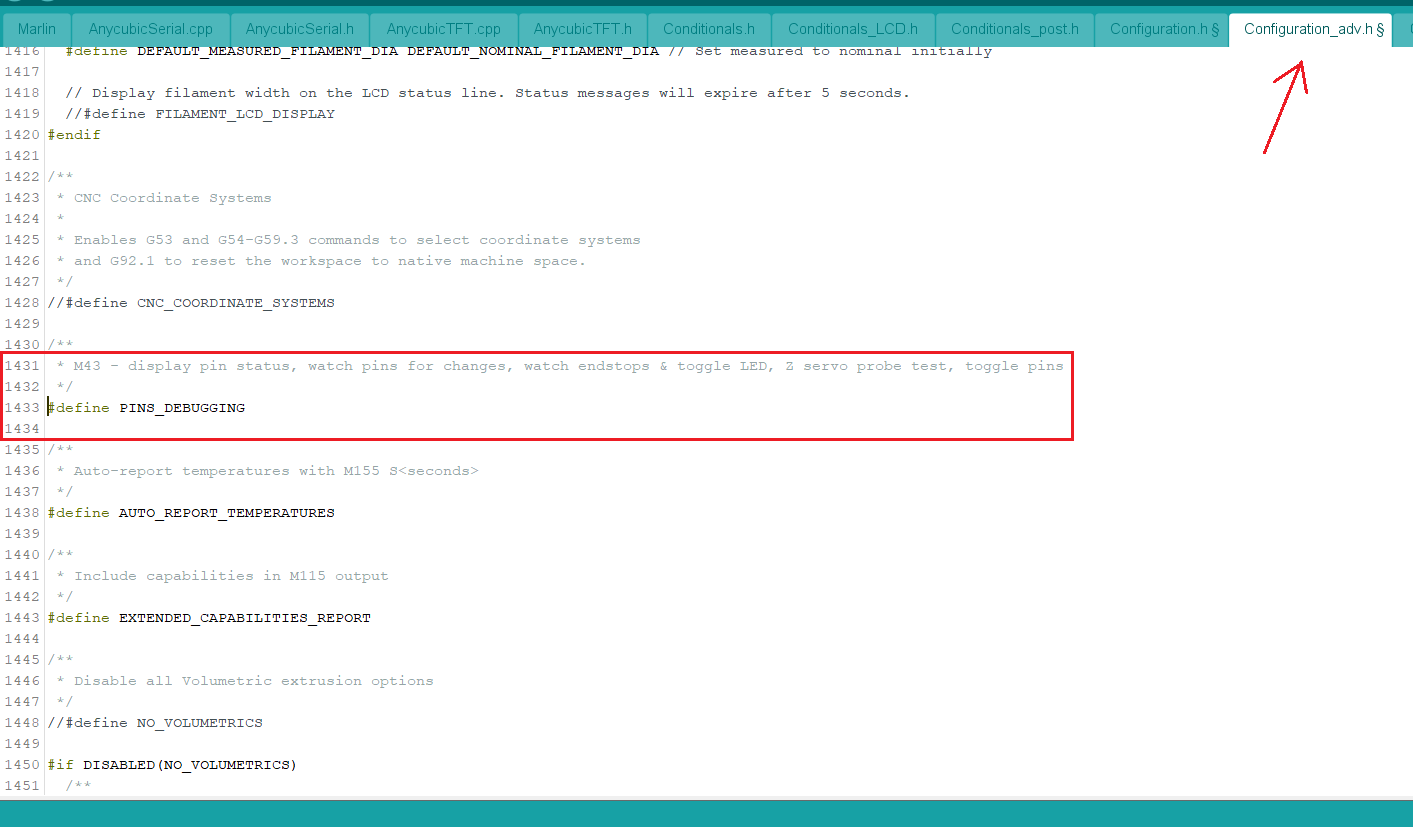
Buongiorno, per ora ho modificato il firmware (foto allegate). Fatemi sapere se l'ho modificato in maniera corretta. Le modifiche consistono nel: - impostare lo 0 al centro del piatto di stampa. - abilitare la funzione PINS_DEBUGGING. Lascio comunque il firmware in allegato. Se è tutto corretto questa sera lo carico e lancio i comandi per i pin. Grazie Marlin.zip
-
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Buongiorno a tutti... Questa sera proverò ad abilitare i comandi per il test sui pin e vi riporterò il risultato. Il video lo avevo trovato pure io ma poi ho smesso di seguirlo in quanto lo Zzero software sembra nn esserci sulla mia stampante.... Cioè avevo provato ad aggiungere un Zzero molto alto per fare dei test ma poi, lanciando il comando di home viene totalmente ignorato il nuovo Zzero e l'asse Z continua a scendere fino a quando nn trova i fine corsa meccanici. Correggimi se sbaglio, ma lo Zzero software nn dovrebbe permettere all'asse Z di scendere sotto a tale valore giusto? E teoricamente i fine corsa meccanici dovrebbero entrare in funzione solo il caso di emergenza!? -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
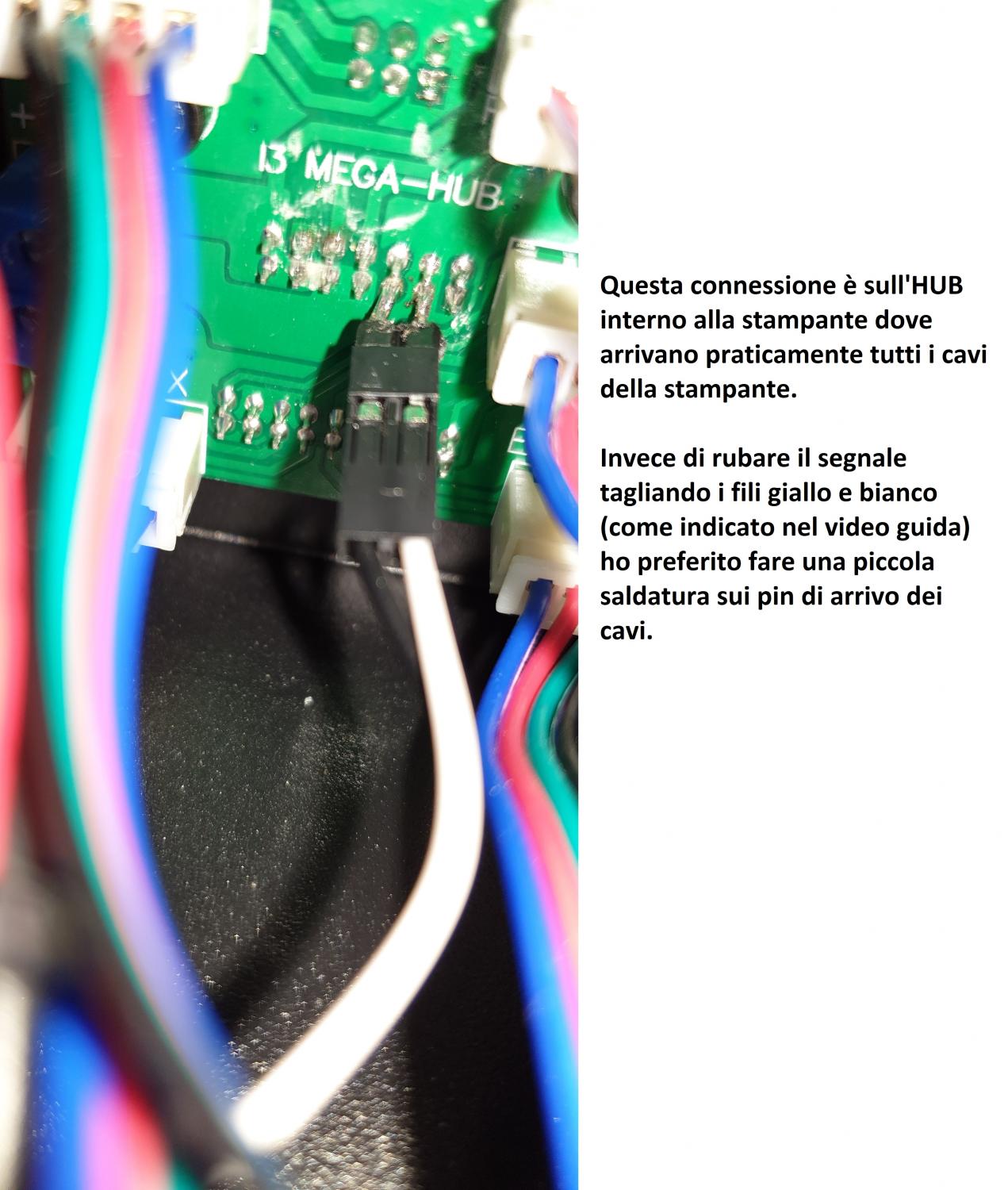
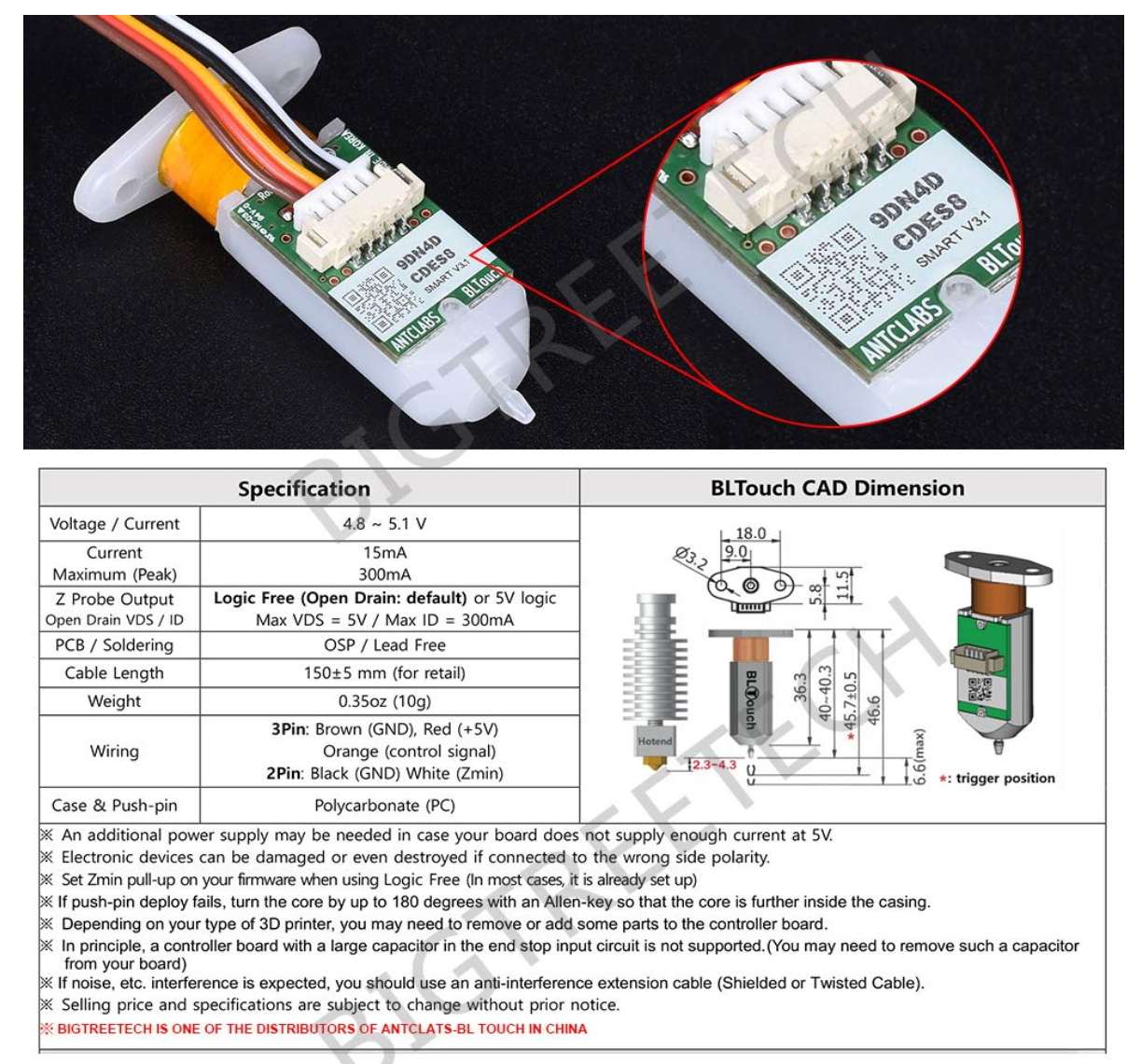
Mmm.... 1- nel video guida dice di "rubare" il segnale dal filo bianco e giallo che si trovano sul carrello ed io mi sono collegato lì...il bltouch ha 5 fili, che sono rosso marrone giallo bianco e nero... Il rosso è marrone sono +5V e gnd, il giallo è per il controllo servo, ed infine il nero ed il bianco li ho collegati ai fili del carrello rispettivamente nero con il bianco del carrello, che corrisponde a GND e il bianco del bltouch con il giallo del carrello, che corrisponde al segnale. 2- ho provato anche a mettere lo zero al centro del piano di stampa ma nn è cambiato nulla... Se vuoi riprovo... Ora nn ricordo qual'e la riga su marlin ma nn è difficile. 3- lo z-offset sinceramente mi è leggermente oscuro e nn ho ben capito come fare..... Nel video guida nn ne fa cenno quindi nn gli ho dato troppo peso. Mi sapresti indicare come fare? Vi ringrazio tutti per le risposte. -
Anycubic i3 Mega + problema con BLTOUCH (Error: Probin Failed)
Robocop ha risposto a Robocop nella discussione Hardware e componenti
Il punto zero della stampante è in quel punto.... Cioè quando premo "home" lei automaticamente si sposta in quella posizione! Sinceramente nn so com'è impostata la mesh di ricerca dei punti... Credo che dove si blocca è il primo punto. Si ho provato a toccare il bltouch prima di arrivare a fine corsa e nn succede nulla.... Anzi il bltouch inizia a lampeggiare di rosso e da quello che ho capito è come se andasse in errore... Senza i fine corsa originali probabilmente andrei ad impattare sul piatto.... Cioè è come se il bltouch nn ci fosse!